1 день назад
Stepan.Burmistrov
186
подписчиков
Роботы- это весело!
Кто бы что не говорил, а оставаться на связи нужно любыми способами
! ➡️ Канал в MAX: https://max.ru/join/qxA1mljdQBoEoRAanBYSypmdQ3XECqJidXbpCY4UjNY ➡️ Канал в ТГ: https://dzen.ru/id/5eb2a21f62c0790b89d506bc ➡️ Сообщество ВК: https://vk.com/burmistrov_robotics ➡️ Личная страница ВК: https://vk.com/stepan.burmistrov ➡️ Дзен: https://dzen...
🤖 Немного пропал из эфира
… Но только потому, что всё самое интересное в этом летнем проекте происходило не снаружи, а внутри. Пока в ленте было тихо, работа шла очень серьёзная. За это время робот был пересобран, для него была сделана нормальная и более надёжная схема питания, а драйверы колёс — в качестве эксперимента — были заменены на перепрошитые платы гироскутера. Кроме того, был переписан и заново запущен сервер дистанционного управления манипуляторами. Организовали туннель до Raspberry Pi, и теперь робот доступен через мобильную сеть...
🤖 Интенсив 2026: что мы вообще строим
? Сегодня начну подробнее рассказывать, чем мы занимаемся на интенсиве и из чего собирается наш большой робот. Одна из главных задач — научиться уверенно управлять большими колёсами от гироскутера. 1. Колёса от гироскутера Колесо гироскутера — это не просто колесо с мотором. Внутри находится бесколлекторный мотор: обмотки, магниты и датчики Холла, по которым контроллер понимает положение ротора и правильно переключает фазы двигателя. Такие колёса удобны для больших учебных роботов: 🛞 у них хороший...
🥨 Интенсив 2026
САГА О ПИРОЖКЕ ⚡️ День 8 — половина позади! Неожиданно быстро прошла уже половина интенсива. Кажется, совсем недавно на столе лежали гироскутеры, профили, фанера, провода и куча отдельных деталей. А сегодня перед нами уже большой робот, который собран, двигается и постепенно превращается в полноценную инженерную систему. Команда, сплочённая занятиями, проектами и многократным участием в соревнованиях, успешно справляется с поставленными задачами 💪 Что уже получилось: 🤖 робот собран; 🛞 колёса вращаются;...
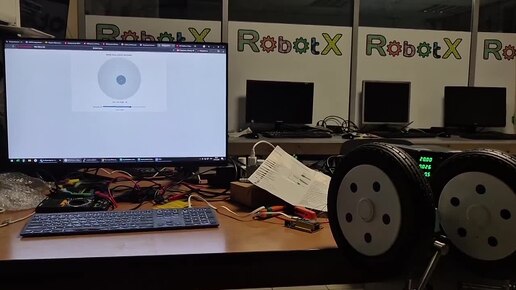
Роберт Иксов, конечно, немного разошёлся с песнями, жанрами и сагой о пирожке
😄 Но вот вам фоточка того, что на самом деле получается в результате интенсива. А получается уже вполне серьёзный робот. 🤖 Робот запущен и управляется в пределах локальной сети. Пока это ещё не финальная версия, т.к. есть надежда пробросить все управление через 4G сеть и доехать до магазина, но важный этап уже пройден: система ожила, команды доходят, механика реагирует, движение есть. Дальше начинается та самая работа, которую не всегда видно на фото и видео: 📟 работа с энкодерами; ⚙️ настройка...
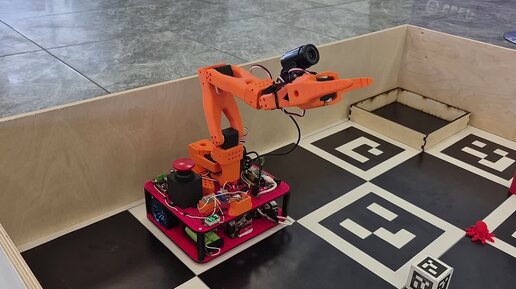
🤖🥨 Интенсив 2026
САГА О ПИРОЖКЕ ⚡️ День 7 — Невидимая работа Новость дня: на роботе заработали два дистанционно управляемых манипулятора! 🦾🦾 Теперь это уже не просто отдельные механизмы на столе, а манипуляторы, установленные прямо на большом роботе. Железо почти собрано, но впереди начинается самая интересная и самая невидимая часть работы: 💻 код 📟 энкодеры 🎮 дистанционное управление 🔌 сигналы, пакеты и команды 🧠 логика движения и отладка Роберт Иксов посвятил этому новый скоростной техно-рэп. Опция посмотреть,...
Кто бы что не говорил, а оставаться на связи нужно любыми способами
! ➡️ Канал в MAX: https://max.ru/join/qxA1mljdQBoEoRAanBYSypmdQ3XECqJidXbpCY4UjNY ➡️ Канал в ТГ: https://dzen.ru/id/5eb2a21f62c0790b89d506bc ➡️ Сообщество ВК: https://vk.com/burmistrov_robotics ➡️ Личная страница ВК: https://vk.com/stepan.burmistrov ➡️ Дзен: https://dzen...
🎙🥨 Интенсив 2026
САГА О ПИРОЖКЕ 🎵 День 6 — шансон о кабельменеджменте Сегодня в РоботИкс снова движ... На роботе, наконец, накачали колеса🛞, подключили энкодеры энкодеры 📟, и протестировали первые выезды с обновлённым управлением Роберт Иксов не смог пройти мимо и выдал новую главу нашей саги: 🎙 «Не базарь, не мельтеши… Провод ровно уложи!» Шансон о кабельменеджменте, мультиметре, осциллографе, гриппере и суровых законах робоЗавода РоботИкс. Без понтов и суеты — чтобы не было беды. 😄 🎬 Смотрим клип шестого дня: ▶️ YouTube https://youtube...
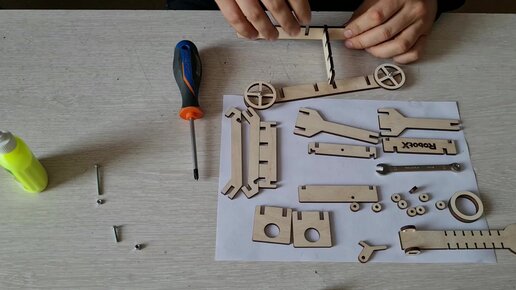
🤠🥨 Интенсив 2026
САГА О ПИРОЖКЕ ⚙️ День 5 Пока все отдыхали на выходных, 3D-принтер продолжал работать. Печатались новые детали, и сегодня они заняли свои места на роботе. 🔌 Собираем электронику. 🧵 Аккуратно укладываем проводку. 🦾 Настраиваем манипуляторы. 🎮 Отрабатываем дистанционное управление. 🥨 Пирожок был выбран в качестве официальной цели испытаний, и сегодня пирожок впервые оказался в захвате манипулятора. А значит робот сделал ещё один большой шаг вперёд. 🚀 🎸 Роберт Иксов представляет новую главу Саги о пирожке...