Мы часто слышим про дронов, роботов и автопилоты, но редко задумываемся, что на самом деле заставляет их не сходить с ума в воздухе, под водой или на пересечённой местности. А ведь это самое интересное. Представьте: вы написали идеальную программу, всё рассчитали на бумаге, но стоит аппарату столкнуться с реальностью — порывом ветра, помехой, отказом датчика — и он ведёт себя как испуганное животное, теряет ориентацию и падает.
Один мой знакомый инженер сказал как-то: «Глупо винить железо, когда не объяснил алгоритму, что делать, если всё пошло не по сценарию». И он прав. Потому что настоящая магия систем управления — не в том, чтобы работать в идеальных условиях, а в том, чтобы сохранять устойчивость, когда вокруг хаос.
Вот об этом сегодня и поговорим. О том, как инженеры учат роботов быть не просто умными, а робастными. Это слово, которое в техническом мире означает одно: система не просто работает в идеальных условиях, а сохраняет устойчивость даже тогда, когда всё против неё — шум, отказы, внешние возмущения присущие той или иной среде. Это как иммунитет, который не даёт организму заболеть при встрече с вирусом.
Невидимые пилоты: кто на самом деле управляет дроном?
Итак, давайте заглянем под капот. Какие системы управления наиболее распространены?
- PID: Это самый простой и быстрый «пилот». Представьте, что вы учите ребенка кататься на велосипеде. Он заваливается влево — вы командуете: «Руль вправо!» (это P-составляющая (пропорциональная), реакция на ошибку). Через час понимаете, что он всегда кренится влево, и начинаете чуть сильнее подруливать (это I-составляющая (интегральная), накопление опыта). А потом видите лужу впереди и заранее говорите: «Готовься, выравниваемся!» (это D-составляющая (дифференциальная), предсказание). PID-регулятор — это и есть такой идеальный «родитель» внутри каждого дрона. Он неустанно делает сотни корректировок в секунду. Но у него есть проблема: если порыв ветра или отказ мотора, он может растеряться.
- LQR: Если PID просто реагирует на ошибку, то LQR просчитывает оптимальную траекторию возврата к норме, балансируя между точностью и затратами энергии. Теперь давайте разберёмся, в чём же главная фишка LQR, и почему это не просто «умный PID». Вся суть — в двух матрицах: Q и R. Именно они зашивают в алгоритм ответ на вопрос: что для нас важнее — скорость и точность или экономия сил и ресурсов? Матрица Q штрафует за любое отклонение от идеальной траектории. Хотите попасть в цель с ювелирной точностью? Закладывайте в Q большие штрафы. Матрица R штрафует за резкие «дёрганья» — за слишком агрессивную работу рулями, за рывки двигателя, которые сжигают топливо или могут разболтать конструкцию. LQR математически ищет точку равновесия между «хочу идеально» и «давайте без фанатизма, побережём моторы».
Представьте, вам срочно нужно добраться до аэропорта. Вы стоите перед выбором: взять велосипед, сесть в такси или арендовать вертолёт. Велосипед — это почти бесплатно, и вы точно никого не разбудите шумом мотора, но ехать будете несколько часов (это аналог контроллера с очень большим R и очень маленьким Q — экономим силы, не спешим к цели). Вертолёт долетит за десять минут, но оставит дыру в бюджете и перепугает соседей (это крошечное R и гигантское Q — время критично, цена не важна). Такси — это классический LQR с хорошо подобранными коэффициентами: вы доедете за разумные деньги и с достаточной скоростью, без лишней тряски. Именно эта гибкая настройка и делает LQR идеальным выбором для задач, где нужно просчитать оптимальный манёвр, не развалив машину по дороге. - MPC: Теперь — высшая лига. MPC, или модельно-прогнозирующее управление. Представьте, что вы едете в аэропорт через центр города в час пик. Обычный круиз-контроль (PID) просто держит скорость, реагируя на машину впереди. LQR построил вам удобную траекторию заранее, но если вдруг перекроют мост — его план рухнет. А MPC работает так: он постоянно «смотрит» на карту на ближайшие 30 секунд, перебирает десятки вариантов — перестроиться ли в соседний ряд, сбросить газ или, наоборот, ускориться, — и выбирает единственную последовательность действий, которая проведёт вас через этот хаос с минимальными потерями времени и без нарушения правил. Через секунду он получает свежие данные о пробках и пересчитывает весь план заново.
В сухом инженерном остатке всё выглядит так. У MPC в голове — математическая модель дрона: как он реагирует на отклонение рулей, на ветер, на изменение тяги. Алгоритм берёт эту модель и «прокручивает» вперёд на несколько шагов, пробуя разные варианты управляющих воздействий. Затем он решает оптимизационную задачу с кучей ограничений — мотор не может выдать бесконечную тягу, корпус не выдержит слишком крутого виража, — и находит тот самый единственный манёвр, который даст наилучший результат. Но применяет он только самый первый шаг этого плана. Через долю секунды поступают новые данные с датчиков, и весь расчёт повторяется заново. Этот принцип называется «скользящий горизонт», и именно он позволяет MPC так элегантно танцевать в воздухе даже в незнакомой обстановке. Это не просто «шахматист, который думает на десять ходов» — это шахматист, который после каждого хода соперника полностью пересчитывает партию, потому что реальность никогда не играет по учебнику.
Главный секрет: почему одним алгоритмам можно доверить жизнь, а другим — нет?
Казалось бы, вот они, три богатыря. Выбирай любой. Но тут в игру вступает то самое слово — робастность.
Представьте, что вы спроектировали свой LQR-контроллер для идеального, безветренного полигона. Он работает как часы. А теперь представьте, что этот же дрон попадает в реальные условия боя: плотный туман, порывистый ветер, вражеский РЭБ ставит помехи. Моторы изнашиваются и теряют мощность. Робастная система должна продолжать работать, сохраняя устойчивость и управляемость. А неробастная — скорее всего, просто рухнет.
В этом и заключается главная разница между красивой лабораторной моделью и реальным оружием. Робастность — это способность системы сохранять запас устойчивости, даже если математическая модель объекта неполна или условия резко изменились. Это как дать нашему алгоритму иммунитет против хаоса реального мира. Для оценки этой «живучести» инженеры используют такие методы, как H-синтез, который позволяет создавать контроллеры с гарантированной устойчивостью к наихудшим возмущениям [1].
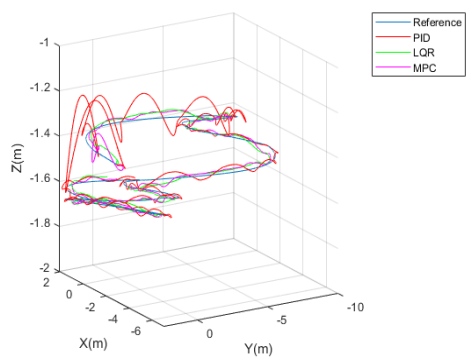
Недавно я наткнулся на любопытнейшее исследование: инженеры взяли обычный мини-дрон Parrot Mambo и «прогнали» его через три одинаковые миссии с разными контроллерами — PID, LQR и MPC. Результаты видны невооружённым глазом. После команды «взлетай и держись» PID-дрон нырял вниз на полметра, его колбасило, и он с трудом находил нужную высоту. LQR показал себя образцовым отличником: почти без качки, отклонение по тангажу — всего 0,025 радиана, то есть аппарат шёл как по рельсам. А вот MPC продемонстрировал самый интересный характер: он жёстко удержал высоту вообще без перелётов, хотя по тангажу чуть уступал LQR — около 0,04 радиана. Ключевой вывод экспериментаторов: LQR оказался лучшим по точности, но MPC — самым робастным и предсказуемым в реальных полётных условиях. Живое доказательство того, о чём мы говорили выше: математика способна не просто управлять, а делать это с разной «философией» [2].
Справедливости ради надо кое-что уточнить. Я сам, когда впервые читал эту работу, чуть не попал в ловушку «ага, PID сливает». Но дьявол, как обычно, в деталях. Авторы использовали одиночный PID-контур, а в реальных дронах так почти никто не делает. Обычно выстраивают каскад: внутренний контур PID держит угловую скорость, поверх него — ещё один PID стабилизирует углы, и только потом — внешний контур для позиции. При грамотной настройке такой «слоёный пирог» способен творить чудеса и сглаживать те самые колебания, которые получились в эксперименте. Так что винить сам PID в провале я бы не спешил — скорее, схема была слишком простой для такой задачи. Но для честного сравнения трёх подходов «один контроллер — одна миссия» такой подход вполне оправдан.
Как это работает в реальном мире: новости с передовой
Итак, от теории к практике. Как все эти «мозги» летают, плавают и ездят прямо сейчас?
- Воздух: Нейросеть + PID. Ученые из AIMS Electronics также провели «битву алгоритмов», но уже в своей категории, сравнив классический PID и гибридный ANN-PID, где нейросеть динамически подбирает настройки. Гибрид показал наилучший результат — ошибку всего в 0,0229 метра. Казалось бы, мелочь. Но именно эта «мелочь» позволяет дрону-камикадзе поразить цель, а разведчику — остаться незамеченным [3]. А российский «Ростех» уже испытал технологию управления роем из 10 дронов Supercam, где оператор только указывает цель, а стая сама распределяет задачи и атакует [4].
- Вода: MPC против океана. Под водой всё еще сложнее: GPS не работает, связь медленная, течения сносят аппарат. Исследование адаптивного управления автономными подводными аппаратами, показало, что связка нейросети и MPC (LSTM-MPC) способна обучаться прямо во время миссии, адаптируясь к изменяющимся условиям. Это настоящий прорыв, который позволит подводным роботам выполнять сложные миссии без участия человека [5].
Подведем итоги
Инженеры уже создают системы, которые способны думать быстрее нас, в головах этих алгоритмов нет ни страха, ни сострадания, ни интуиции — только математически просчитанный оптимум. Исход схватки двух роев решит не отвага операторов, а то, чья модель реальности оказалась на долю секунды точнее и робастнее.
Мы вручаем оружию собственное подобие мозга с «иммунитетом» к помехам, но при этом сами до конца не знаем, как этот мозг поведет себя в условиях, которые мы не смогли предсказать. Добро пожаловать в эпоху, где главный герой — не человек, а формула.
Пишите в комментариях, как думаете: появятся ли в ближайшие годы полностью автономные боевые роботы, которым не нужен оператор даже для принятия решения об открытии огня? Или последнее слово всегда должно оставаться за человеком? Жду ваших мыслей — вместе всегда интереснее.
И не забывайте подписываться на «ТехноФронт», чтобы не пропустить новые разборы технологий, которые меняют всё!
Использованные источники:
- Синтез H∞ - наблюдателей состояния нелинейных непрерывных динамических систем, линейных по управлению и возмущению https://psyjournals.ru/journals/mda/archive/2025_n2/Panteleev_Yakovleva
- Design and Experimental Comparison of PID, LQR and MPC Stabilizing Controllers for Parrot Mambo Mini-Drone https://www.researchgate.net/publication/360997743_Design_and_Experimental_Comparison_of_PID_LQR_and_MPC_Stabilizing_Controllers_for_Parrot_Mambo_Mini-Drone
- A comprehensive survey of UAV control algorithms: Integrating classical methods with artificial intelligence for enhanced trajectory tracking https://www.aimspress.com/article/doi/10.3934/electreng.2026002
- «Ростех» сообщил об успешных испытаниях технологии роя дронов https://iz.ru/2078493/2026-04-14/rostekh-soobshchil-ob-uspeshnykh-ispytaniiakh-tekhnologii-roia-dronov
- Adaptive Data-Driven Control of Autonomous Underwater
Vehicles: Bridging the Gap Between Simulation and
Experimental Baseline via LSTM-MPC https://www.mdpi.com/2076-3417/16/9/4187