Начинаю выкладывать наши модели для дополнительного обвеса роботов.
Все, кто имел дело с креплением сервопривода на распространенных металлических шасси для создания мобильных роботов, наверняка сталкивался с проблемой закрепления "головы" робота с дальномером на сервоприводе. Стандартное крепление - коромысло или крестовина. Но далее к ним еще надо как-то приделать держатель датчика, а деталька хрупкая...
Поэтому еще в 2020 году мы разработали более удачную конструкцию и на текущий момент она нас только радует. Автор проекта А.Григорьев.
Делимся файлами FCStd (freeCad) и stl.
Используем и на шасси роботов mBot и на нонеймах.
Состав и краткое описание.
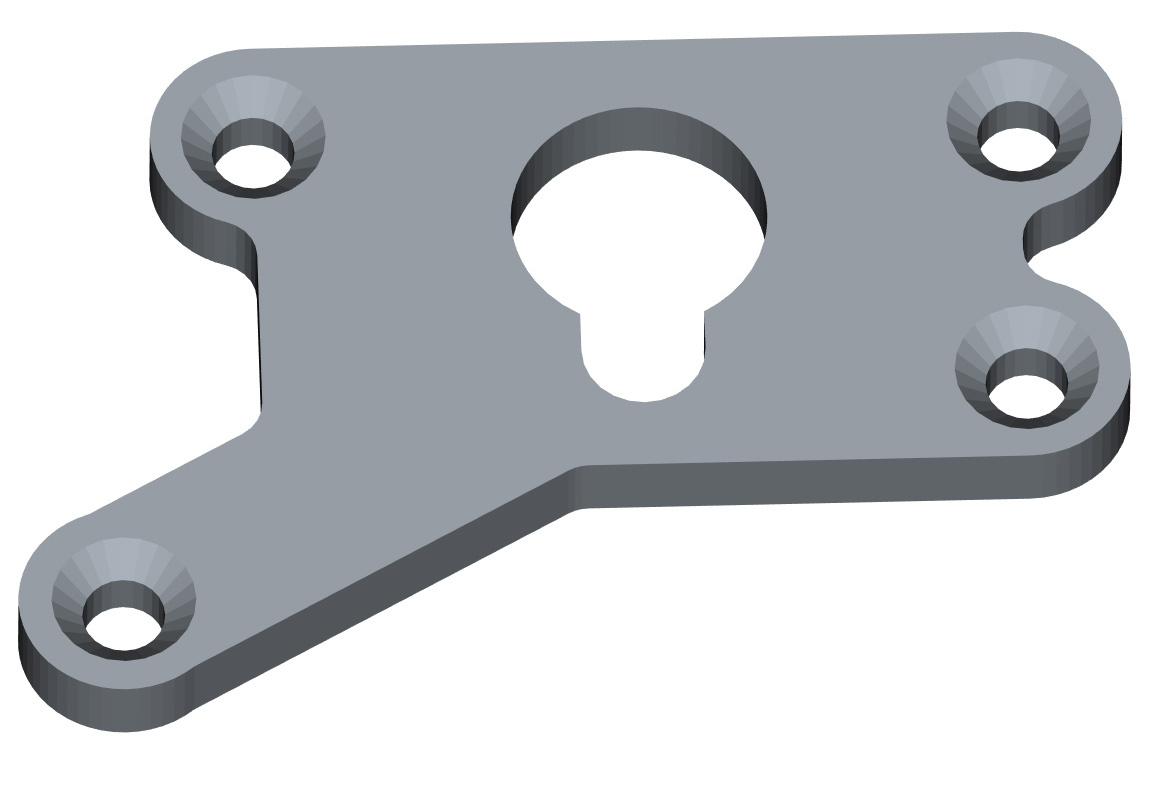
1. База для крепления на шасси. Файл Servo-kr
Крепится винтами на металлическое основание шасси. Шасси бывают слегка короче или длиннее, но по винтам они совпадают. Как крепится, смотрите ниже.
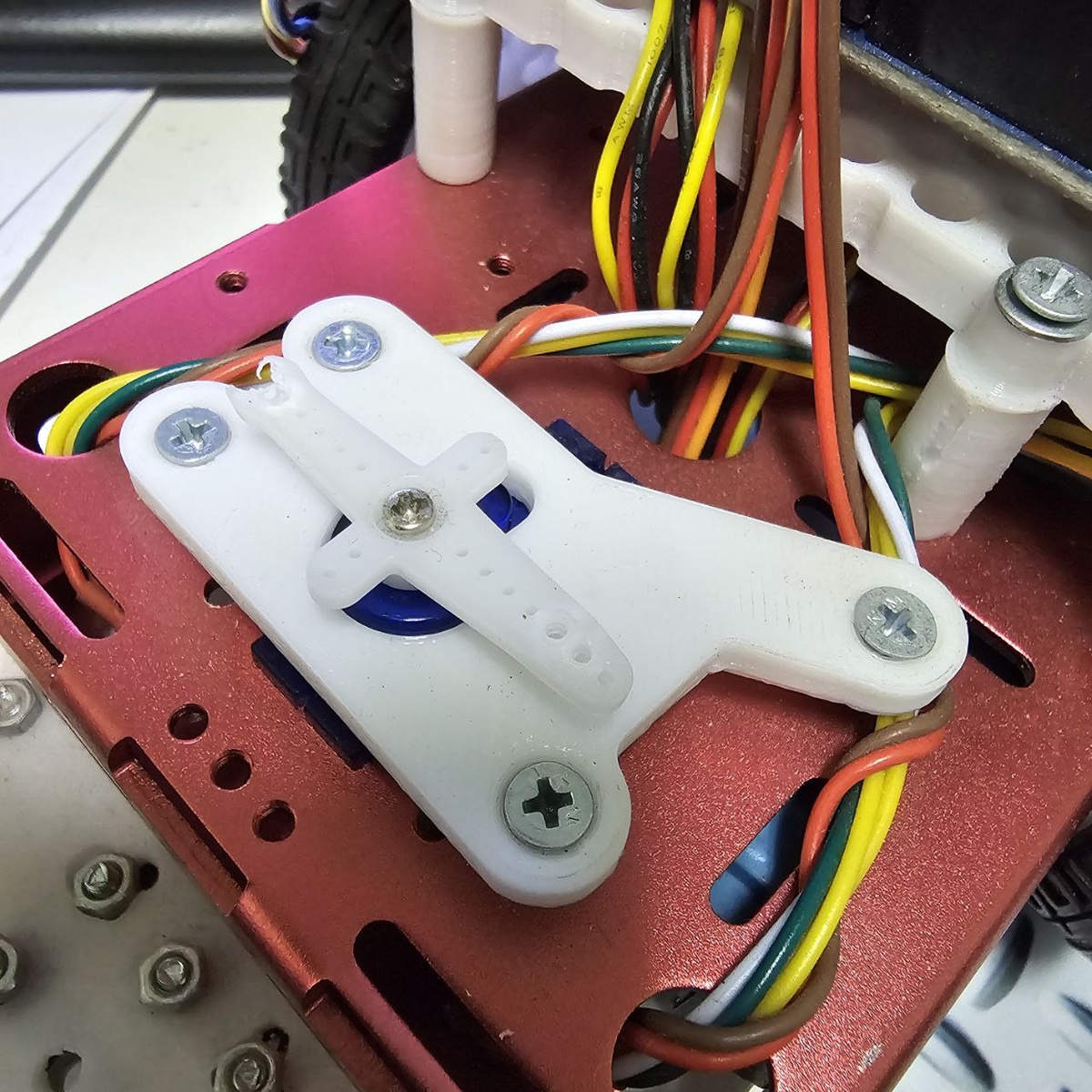
Решил добавить еще фото, чтобы показать, что внизу. На нем, правда, уже голова установлена, но идея все равно понятна. Отверстия в шасси уже с резьбой, так что просто аккуратно вкручиваем.
2. Первый вариант "головы" для УЗ датчика HC-SR04. Файл US-krepl
Варианты будут разные, можно выбирать, какой в вашем варианте удобнее.
3. Второй вариант крепления. Файл US-kr_v2
4. Самый интересный вариант, крепление для УЗ и ИК датчиков. Файл US-kr_v3
В своих последних модификациях роботов мы используем именно данный вариант. Комбинация УЗ датчика типа HC-SR04 и ИК датчика Sharp позволяет организовать очень интересные задания по приведению значений к одним показаниям дальности, а также использовать сильные стороны каждого типа датчиков. Это позволят и плоскости хорошо определять, и тонкие предметы.
5. Крепим "Голову"
Выбранный вариант крепим к базовому коромыслу сервопривода
Все, можно ставить датчики.
Это действительно оказалось очень удачное крепление. Рекомендуем!
Все файлы в форматах freeCad и stl выложены в папку проекта.
Там и отдельные файлы моделей и zip архив со всеми сразу.