Активные разработки первых беспилотных катеров с системой дистанционного (волнового) управления в Советском союзе начались еще в 1920-х годах. Первыми решениями, которые были признаны перспективными, стали радиоуправляемая катер-торпеда «Пионер» (разработан Остехбюро под руководством советского инженера-изобретателя Владимира Бекаури) и радиоуправляемый катер «Оса» (разработка инженера-связиста Александра Шорина, Центральная Лаборатория Проводной Связи).
Инженерам было выдано задание на дальнейшую разработку системы дистанционного управления для серийного торпедного катера.

Системы были похожи, но различались по концепции: система Бекаури предполагала, что оператор управляет катерами с борта другого корабля или катера. Взаимное положение относительно цели определялось с помощью электромеханического счетно-решающего устройства. В случае же с системой Шорина оператор должен был находиться на борту самолета управления, который наблюдал за катером сверху.
В 1931 году после сравнительных испытаний двух систем было выбрано решение Шорина. Уже весной 1932 года разработка Центральной Лаборатории Проводной Связи была рекомендована к принятию на вооружение.
Сначала аппаратурой радиоуправления оснастили 30 катеров Ш-4 («Шарли»), затем производство переключилось на более новые Г-5. Всего общий выпуск электронной аппаратуры составил порядка 200 комплектов «Вольт».
«Ш-4» строились в Ленинграде на заводе им. Андре Марти (сейчас — Адмиралтейские верфи ОСК), там же строили и глиссирующие торпедные катера «Г-5» по проекту разработанному ЦАГИ под руководством Туполева.
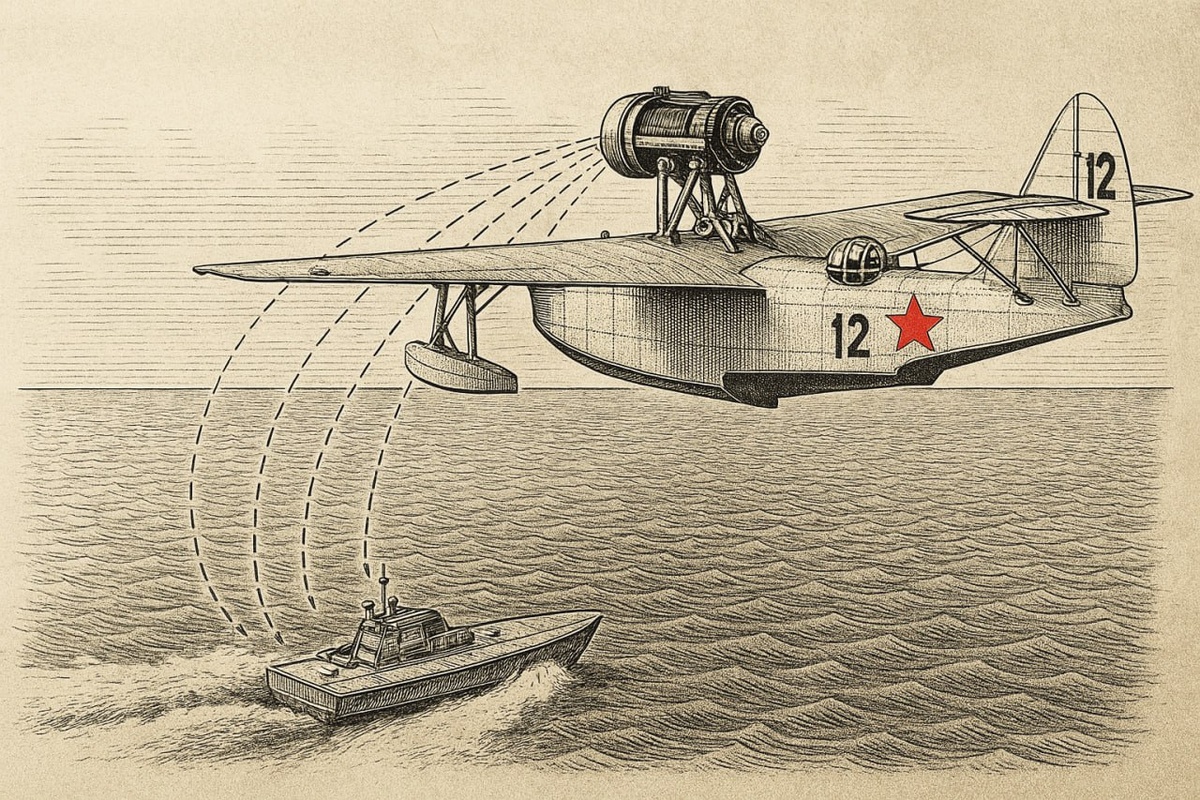
Катера управлялись модификация летающей лодки (гидросамолета) МБР-2, которая получила обозначение МБР-2ВУ (Волнового Управления).
В центральном отсеке самолета размещалась станция управления «Кварц», а экипаж пополнился двумя наблюдателями-операторами. Одна МБР-2ВУ должна была управлять сразу двумя телемеханическими катерами.
В середине 30-ых катера волнового управления запустили в серийное производство. В то же время были сформированы дивизионы катеров «волнового управления» в каждой из бригад торпедных катеров на Балтийском, Черноморском и Тихоокеанском флотах. Для управления телемеханическими катерами создали «особые авиаэскадрильи волнового управления» (ОАЭ ВУ), укомплектованные летающими лодками МБР-2ВУ.
Продолжение следует…