Дугинов Л.А. L.duginov@mail.ru
Ключевые слова: новый метод расчёта, сложные гидравлические цепи, регуляторы расхода, определение диаметров.
Введение
Допустим, у вас есть готовая сложная гидравлическая модель, например, как показанная на рис.1. Конструкция состоит из 8 трубок (сопротивления Z1-Z8) и напорного элемента H1. Вам известна полная информация о геометрии всех 8 труб, величины напора H1, а также замерены расходы среды q1-q8 в каждой трубке. Но величины расходов в ветвях q5,q6 вас не устраивают и необходимо получить совершенно другие величины расходов q5 и q6. При этом можно изменять только диаметры трубок Z5 и Z6, сохраняя их длины L5 и L6. Диаметры и длины остальной части конструкции (ветви 1, 2-4, 7-8) и величины напоров H1 также не меняются! Короче говоря, можно изменить только диаметры диаметры трубок Z5-Z6.
Конечно, изменив диаметры трубок D2-D5 и получив необходимые расходы среды в них, вы неизбежно поменяете и расходы во всех остальных трубах схемы. но вас интересует только получение заданных расходов в этих 2-х трубах при максимальном сохранении фирменной геометрии.
Рис.1 Гидравлическая модель сложной схемы
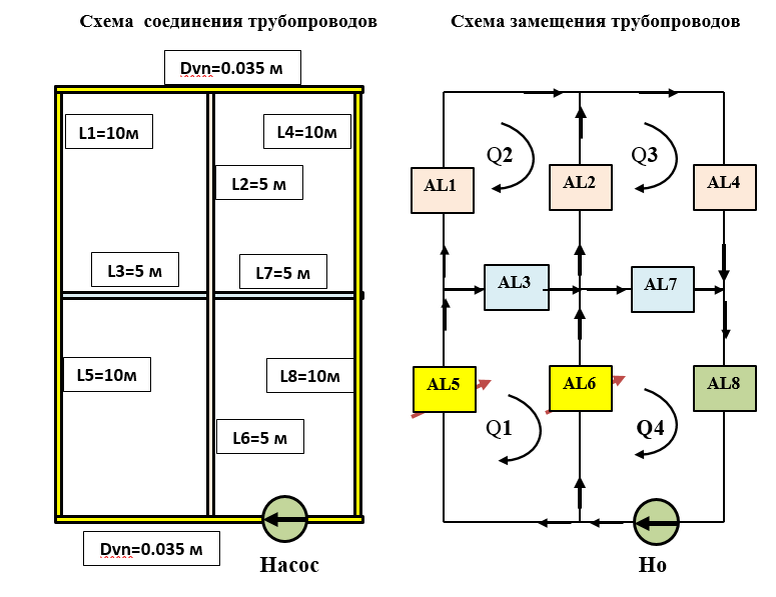
Примечание: На рис.1 в ветвях №5 и №6 включены регуляторы с заданными величинами расхода q5, q6
Алгоритм решения
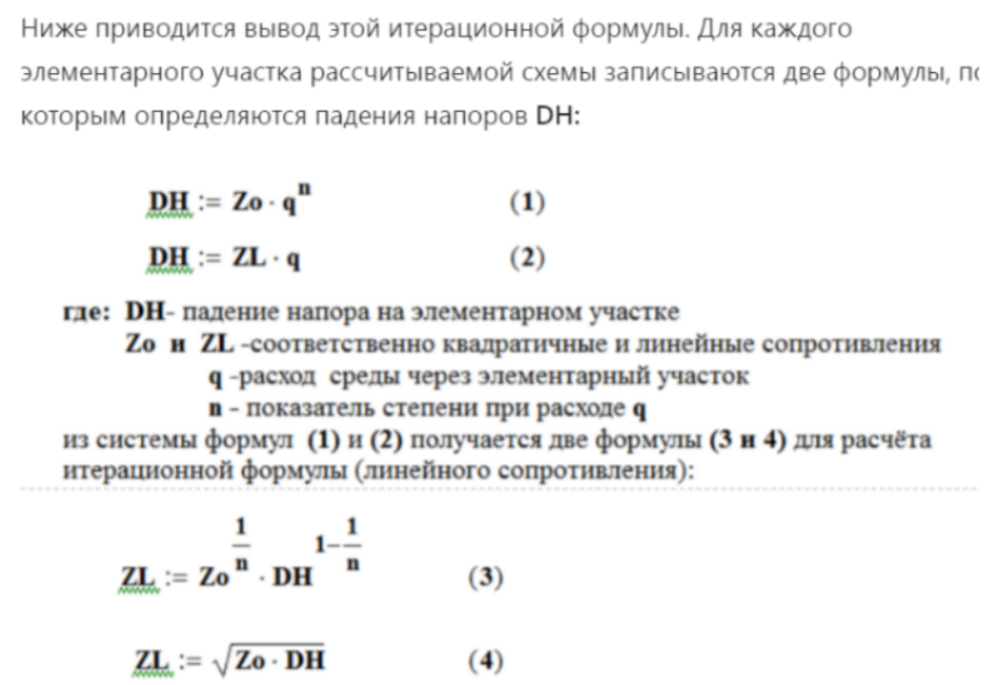
Для решения этой задачи применён новый метод линеаризации системы нелинейных элементов, основанной на специальной итерационной формуле:
Далее, имея такой мощный и надёжный инструмент для расчёта гидравлических схем, мы можем смело применить включение в схему регуляторов расхода в которых очень легко задаётся необходимая величина расхода для выбранной ветви схемы. Достаточно ввести в программу формулу расчёта линейного сопротивления регулятора расхода ZRL:
ZRL=DH/qx, где: DH - падение напора на регуляторе, qx-заданный расход через регулятор.
Количество регуляторов которое можно включить в схему ограниченно сложностью схемы и величинами сопротивлений и напоров. Обычно, количество регуляторов определяется опытным путём. Впрочем, это условие легко определяется в практических расчётах.
В целях сокращения объёма программы гидравлического расчёта схемы рис.1
( в матричной форме) вводится новая формула расчёта сопротивления трения-AST в каналах труб 1-8:
Порядок определения новых величин диаметров D1-D2 в ветвях схемы (1-2) для получения заданных расходов q1-q2.
- В самом начале необходимо выполнить полный расчёта гидравлической схемы на рис.1 (только без установки регуляторов расхода) в результате которого вы получаете расчётные величины расходов всех 8 ветвях схемы q1-q8. Определяете номера ветвей схемы в которых необходимо заменить полученные величины расходов воды на новые необходимые значения расходов ( для примера,в нашем случае-это ветви 1-2)
- В определённых номерах ветвей (1-2) вместо прежних сопротивлений труб вы включаете в схему цифровые регуляторы расхода, помеченные на рис.1 жёлтым цветом. Величины линейных сопротивлений регуляторов ZL1 и ZL2 определяются по формулам: ZL1=DH1/qx1 и ZL2=DH2/qx2.
- Для получения контрольных значений диаметров DS во всех ветвях схемы рис.1 (после включения 2-х регуляторов расхода в ветви 1-2) необходимо добавить ещё одну формулу в матричной форме :
4. Остаётся только проверить-получатся ли заданные значения расходов qxk1 и qxk2 в ветвях 1 и 2 если в исходных данных заключительного контрольного расчёта в этих ветвях поставить новые значения диаметров D1 и D2, а цифровые регуляторы расходов ZL1 и ZL2 убрать.
Ниже приводится полная распечатка исходного гидравлического расчёта рис.1 в котором ещё не установлены в ветвях 1-2 регуляторы расхода, а диаметры труб D1-D2 в ветвях 1-2 пока сохраняют прежнее значение.
Распечатка итерационного расчёта 1
Пояснения к начальному расчёту-1:
В результате расчёта 1 получены величины расхода воды во всех 8-ми ветвях схемы. Величины расходов qk1-qk2 в ветвях 1-2 необходимо заменить в следующем расчёте-2 на: qk1=0.57*10^-4 и qk2=0.513*10^-4
--------------------------------------------------------------------------------------------
Распечатка итерационного расчёта 2
в котором в ветви 1 устанавливается цифровой регулятор R1 для установки расхода qk1=0.57*10^-4 (был qk1=1.07*10^-4) , а в ветви 2- устанавливается цифровой регулятор R2 для установки расхода qk2=0.513*10^-4 (был qk2=1.513*10^-4). В результате расчёта определяются новые диаметры труб D1-D2 в ветвях 1-2.
Распечатка итерационного расчёта 3
в котором из ветвей 1-2 удалены цифровые регуляторы R1-R2 и установлены новые расчётные значения диаметров D1-D2. В результате расчёта-3 определяются величины расходов во всех ветвях схемы рис.1.
Погрешность установки расходов qk1 и qk2 в ветвях схемы 1-2 составляют:
Выводы
- Цифровые регуляторы расходов можно использовать в качестве инструмента для определения необходимых диаметров труб, которые будут устанавливаться взамен старых, что должно обеспечивать необходимый расход воды через них. (см. л.3.)
- Максимальное количество цифровые регуляторов расходов, устанавливаемых в данную схему определяется опытным путём.
- Расчёт сопротивлений трения с помощью степенных сопротивлений выполнен в матричной форме для гладких каналов, в которых применима формула Блазиуса. Более подробную информацию (см. л.4.)
Литература
- Аврух В. Ю., Дугинов Л. А., Карпушина И. Г., Шифрин В. Л. Математическое моделирование на ЭВМ вентиляционных систем турбогенераторов // Электротехника. – 1975. – № 12.
- Дугинов Л.А., Розовский М.Х. Простой метод расчёта для сложных гидравлических систем., ТПА,-2020. -№2 (107).-50c.
- Дугинов Л.А., О возможности применения регуляторов расходов в новом методе расчёта гидравлических цепей произвольной сложности.Сайт dzen.ru «Про Гидравлику и Электрику». 05.07.2023 г
- Дугинов Л.А. Новый метод расчёта сопротивлений трения (для гидравлических схем произвольной сложности). Сайт dzen.ru «Про Гидравлику и Электрику». 23.11.2022 г
- Идельчик И.Е. Справочник по гидравлическим сопротивлениям. Москва, «Машиностроение» 1991.