Зубчатые конические механизмы (рис. 7.1) широко применяют для передачи вращательного движения между валами трансмиссии в машиностроительном и технологическом оборудовании, в конструкции главной передачи автомобилей и т.п. По аналогии с цилиндрической передачей каждый конический зубчатый механизм можно представить как аксоидный (рис. 7.2). Линией контакта аксоидов 1 и 2 является прямая OP, а осями вращения – прямые OO1 и OO2.
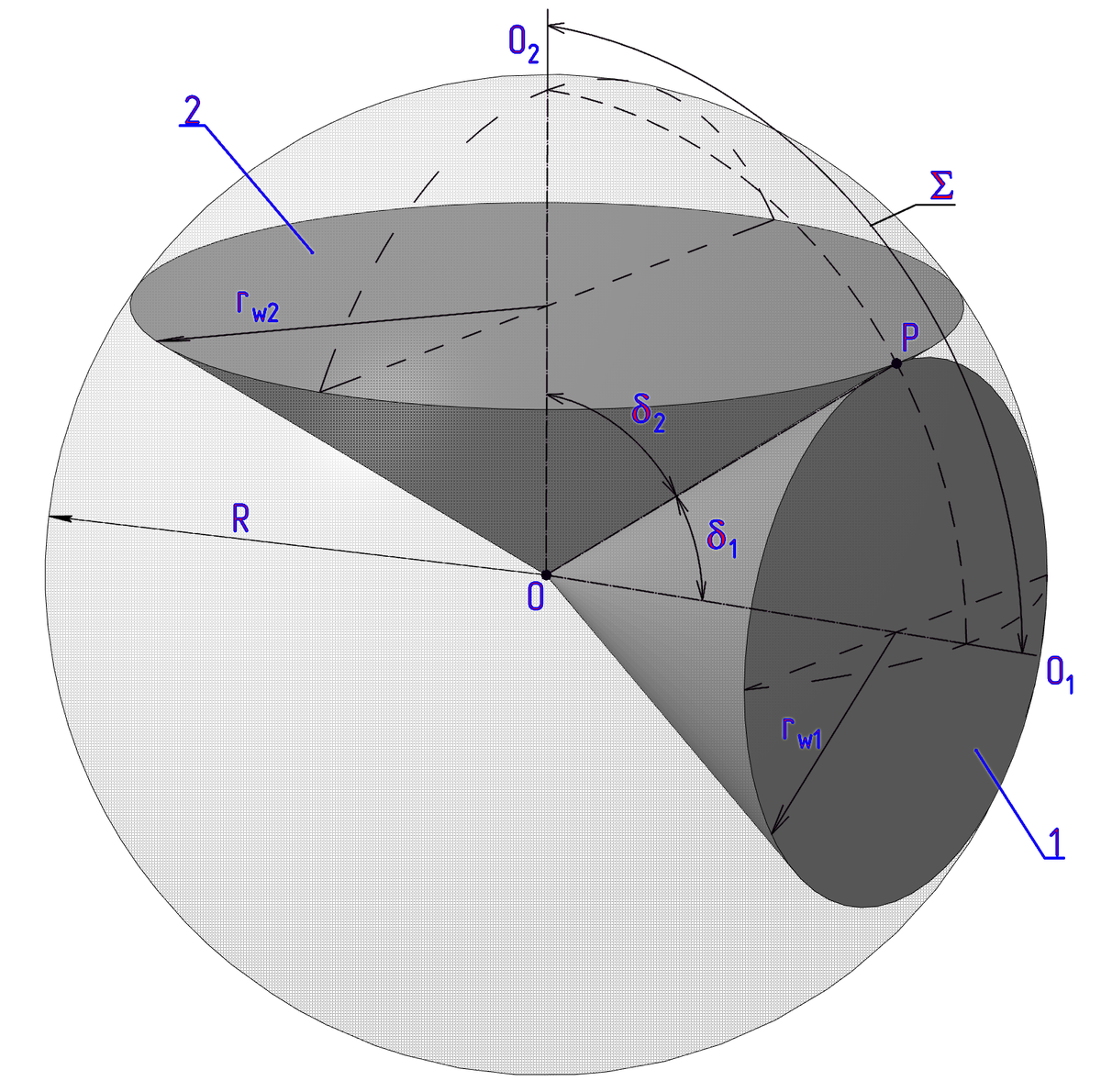
При синтезе зубчатой конической передачи исходными параметрами обычно являются передаточное число U12 и угол Σ между осями этих колес. Углы δ1 и δ2, равные половинам углов раствора аксоид, могут быть определены из следующих условий
Подставляя в формулу (7.56) значение угла Σ из выражения (7.57), можно получить зависимость для определения угла δ1
В случае, когда угол Σ = 90°, формула (7.59) примет следующий вид
Угол δ2 из выражения (7.57)
Модель сферической эвольвенты зубчатых конических колес можно представить следующим образом (рис. 7.3). Конусы I и II являются основными конусами. Их радиусы можно определить по следующим формулам
где угол профиля αw для конической передачи обычно составляет 20° при коэффициентах смещения
В остальных случаях угол профиля αw может быть определен по формуле (7.23).
Радиусы начальных аксоид rw1 и rw2 при выполнении условия (7.64) будут равняться делительным радиусам r1 и r2, которые можно рассчитать по формулам (7.17) и (7.18). В остальных случаях
где R – радиус сферы (длина образующей начальных конусов, отрезок OP), мм.
На рис. 7.3, как и на рис. 7.2, точка Р является полюсом зацепления на рассматриваемой сферической поверхности, а отрезок OP – линией контакта сферических эвольвент Э1 и Э2. Каждая из эвольвент образуется развертыванием конической поверхности соответствующего основного конуса. Например, точка Р эвольвенты Э1 образуется путем развертывания дуги A0A основания основного конуса I в кривую AP, лежащую на поверхности сферы.
В точке А касания плоскости S1 с основным конусом I образуется угол 90°. Связь между текущей длиной развертки APi и углом φ следующая
Величина дуги AP в точке касания P
где δb1 – половина угла раствора основного конуса шестерни.
Таким образом, задавая различную длину дуги APi и вычисляя угол φ по формуле (7.68), может быть построена эвольвента Э1 на наружной поверхности сферы. Поверхность эвольвенты Э1i, лежащая внутри сферы, может быть получена путем пропорционального уменьшения наружной кривой Э1.
Путем зеркального отражения эвольвенты относительно середины угловой толщины зуба αSw по окружности начального конуса можно получить зуб (рис. 7.4). Конусы, ограничивающие вершины зубьев являются конусами вершин ra1 и ra2, а конусы, на которых расположен зуб – конусами впадин rf1 и rf2. Сопряжение сферической эвольвенты с поверхностью конуса впадин осуществляется переходной кривой или галтелью.
Угловая толщина зуба αSw, рад, по окружности rw1:
где inwα – инволюта стандартного угла зацепления (20°), равная 0,0149044; inwαw – инволюта действительного угла зацепления (7.24).
Радиусы конусов впадин определяются по стандартной методике:
а радиусы конусов вершин будут вычисляться таким образом, чтобы в зацеплении сохранился зазор 0,25m:
При коэффициентах смещения x1 и x2, удовлетворяющих условию (7.64), радиусы вершин будут определяться по более простым зависимостям
С учетом сложности получения сферической эвольвенты проектирование конических зубчатых колес рекомендуется выполнять автоматизированным методом. Ниже приведены видеоинструкции по созданию 3D-моделей конических зубчатых колес.