Процесс оптимизации на сегодняшний день вызывает интерес в различных отраслях, таких как авиастроение, судостроение, автомобилестроение и многие другие. Подобное внимание обусловлено тем, что оптимизация позволяет значительно ускорить поиск лучшего решения задачи. Однако работа со сложными криволинейными формами имеет множество тонкостей, которые препятствуют массовому использованию данной технологии.
Параметрическая оптимизация сосредоточена в изменении параметров, обуславливающих форму объекта. Основная проблема заключается в огромном количестве этих самых параметров. К примеру, для гребного винта количество точек, описывающих его форму, может быть более 100, в том числе за счёт его профилировки (часто не единой). Ни один оптимизатор не способен эффективно работать с таким количеством входных данных и выдавать оптимальную геометрию за приемлемое время. Он просто «захлебнется», осуществляя перебор вариантов.
В конце статьи вас ждет бонус — PDF-кейс с реальным примером. Узнайте, как параметризация сложных форм может полностью преобразить подход к оптимизации изделий.
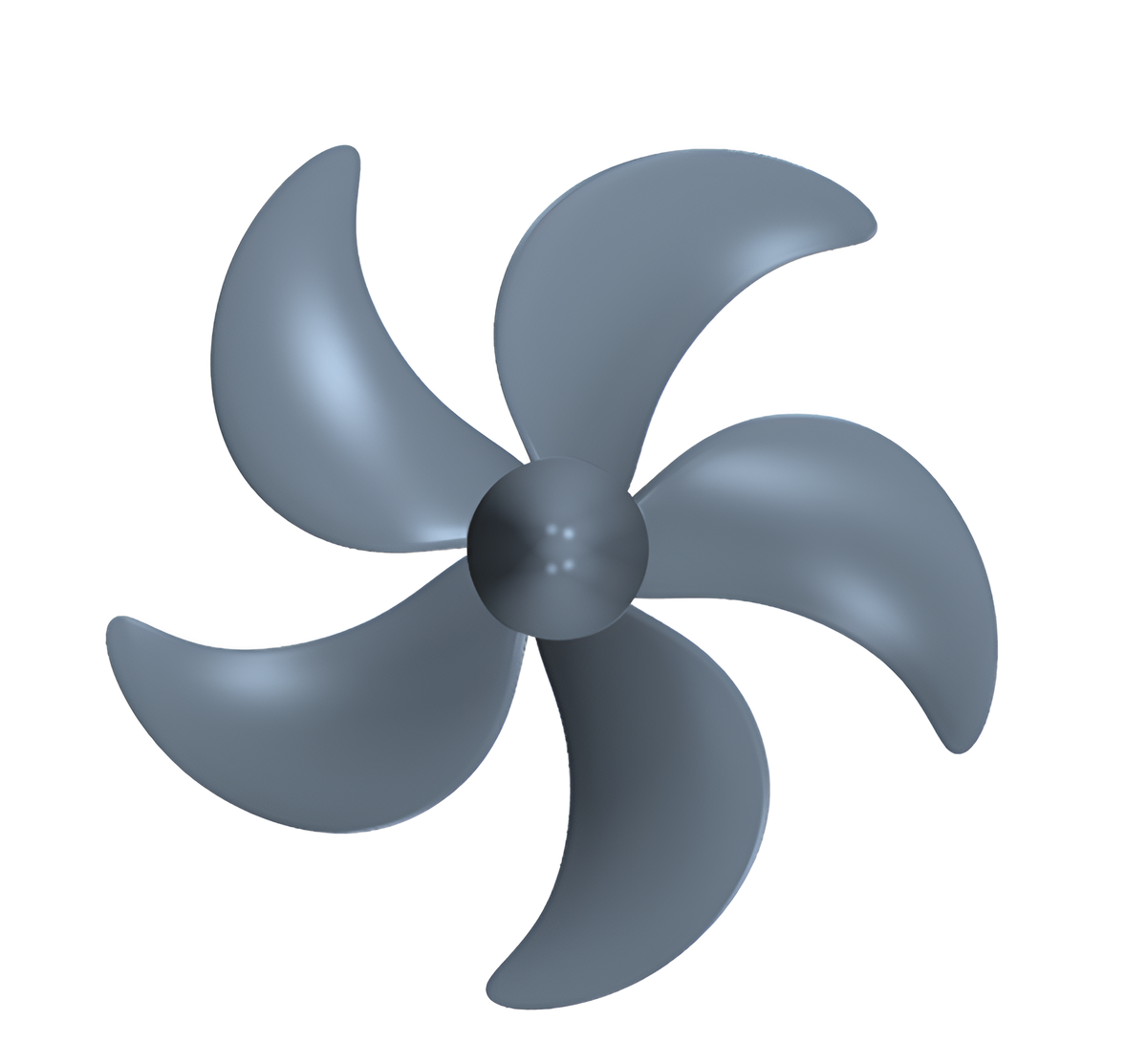
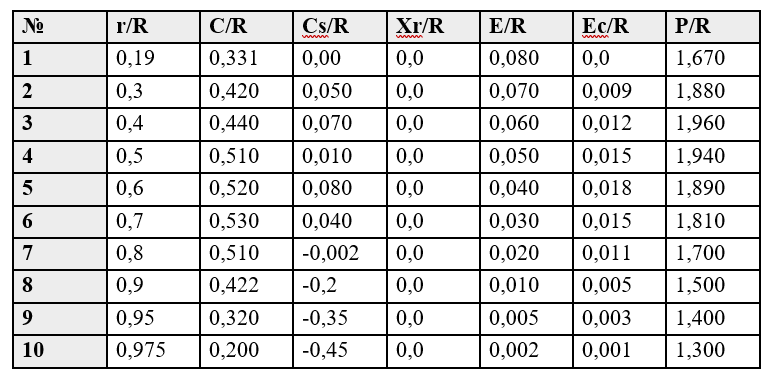
В основе самого гребного винта лежат аэродинамические профили, которые определяют, как жидкость будет двигаться вокруг самой лопасти. Помимо этого, важно выделить основные величины, характеризующие модель по относительным радиусам лопасти. Этими элементами для лопасти движителя являются:
- длина хорды (C/R),
- толщина (E/R),
- кривизна (Ec/R),
- шаг (P/R),
- саблевидность (Cs/R),
- откидка (Xr/R),
- позиция максимальной кривизны и позиция максимальной толщины.
И тут начинаются проблемы
Ещё одной проблемой является сам процесс изменения формы модели. Если представить, что существовал бы такой оптимизатор, способный переварить подобный объём данных, то вопрос успешного перестроения модели остается открытым. Даже при незначительных изменениях геометрии у объекта появляются зазоры. А все потому, что современные CAD-программы не заточены под оптимизацию, они просто не в силах быстро и в широком диапазоне параметров перестроить геометрию. При попытках изменить сложную криволинейную форму программно, а не вручную (ведь мы хотим добиться автоматизации процесса) модель винта проявляет все признаки «болезни»: расхлябанность и несобранность – на поверхности объекта появляются несостыковки и осцилляции. Во время создания сетки для численного анализа эти зазоры могут привести к образованию некорректных элементов. Инженеру приходится «лечить» такую модель, долго и вручную, а значит придётся попрощаться с автоматизацией и дедлайнами.
Компания «ЛС-Технологии», является разработчиком технологии трехмерной параметрической оптимизации сложных криволинейных форм. Данная технология смогла решить проблемы, описанные выше, и все благодаря программному обеспечению Flypoint Parametrica, позволяющему легко управлять формой геометрии любой сложности в самом широком диапазоне параметров, без потери математического описания и режиме реального времени. Такую «живую» 3D-модель можно смело отдавать на оптимизацию, не переживая, что она сломается в моменте подбора наилучшего параметра. А если вы хотите, чтобы процесс оптимизации был приятен и быстр, то вам необходима наша программная платформа LS-TECH Framework, которая взяла на себя полную автоматизацию всего процесса оптимизации, но об этом чуть позже.
Правильная параметризация гребного винта
Имея полный доступ к исходной математике гребного винта, Flypoint Parametrica сокращает число управляемых параметров. Как именно программа это делает? Дело в том, что на исходные сплайны накладывается специальная деформационная кривая, которая содержит от 1 до 4-х точек. Такое небольшое количество позволяет легко и удобно управлять формой модели в режиме реального времени и в широком диапазоне параметров. Во время работы с геометрией в Flypoint Parametrica появление зазоров невозможно, а сокращение числа подконтрольных точек позволяет упростить работу как человеку, так и оптимизатору, благодаря чему весь рабочий процесс не прерывается на доработку или правки.
Математическое моделирование обтекания движителя
Для нахождения гидродинамических характеристик гребного винта проводилось численное моделирование обтекания движителя в однородном потоке (или как говорят в судостроении – в свободной воде). Расчет выполнялся в Star-CCM+ в стационарной постановке с использованием осредненных по Рейнольдсу уравнений Навье-Стокса, замкнутых моделью турбулентности k-ω SST Ментера.
При проведении численных расчётов важную роль играет установление независимости решения от параметров расчётной сетки. Для этого проводится сеточная сходимость. Немаловажно также в процессе её проведения следить за таким безразмерным параметром как Y+, который используется для оценки пропорциональности размера элемента сетки на границах модели, и делается это не просто так. Дело в том, что в пограничном слое при значении Y+ от 30 до 120 используются пристеночные функции. Но если значение безразмерного параметра варьируются от чисел близких к 0 до 1, то течение в пограничном слое моделируется без упрощений. В ходе проведения сеточной сходимости проверяются оба варианта таких сеток для большего понимания о том, как ведет себя поток.
В ходе расчётов было обнаружено, что сеточная сходимость наступает на сетке размерностью 14 000 000 ячеек. Для дальнейшей оптимизации выбраны сетки в 200 тысяч и 14 миллионов ячеек, чтобы проследить, будет ли меняться характер изменения геометрии в ходе оптимизации в зависимости от размерности сетки.
В рамках работы над сеточной сходимостью, мы оценивали интегральные характеристики судового движителя, а именно: упор, момент и КПД. В судостроении их чаще всего представляют в безразмерном виде: 𝐾𝑇, 𝐾𝑄 и 𝜂0. Именно эти параметры мы и снимали с нашего винта.
Настройка процесса оптимизации с помощью LS-TECH Framework
Плавно перейдем к постановке задачи оптимизации. Необходимо выбрать целевую функцию, в нашем случае это – КПД движителя. Важно не забыть задать ограничения по характеристикам и указать управляемые параметры. Всё это сузит вариативность изменения формы винта, что поможет оптимизатору быстрее прийти к цели. Как некоторым людям удобно работать с чётко поставленными задачами, так и программе действовать в конкретных рамках. Мы указали оптимизатору, что оптимальное значение момента не должно быть выше исходного, оптимальное значение упора – не ниже исходного, оптимальное значение давления вокруг винта – не ниже. Подобные характеристики на новом винте не просто улучшат его работу, но и продлят срок службы за счёт снижения рисков на наступление кавитации.
В качестве управляемых параметров выбраны 3 параметра по шагу лопасти гребного винта и 2 параметра по кривизне лопасти без изменений на корне и кончике самой лопасти. Подытожив весь труд, описанный выше, мы готовы запустить оптимизацию. Она состоит из трёх блоков:
- Модель винта меняет свою форму в режиме реального времени и широком диапазоне параметров средствами Flypoint Parametrica
- Далее она передается в решатель Star-CCM+ в автоматическом режиме. Отметим, что LS-TECH Framework позволяет проводить интеграцию с любым расчетным ПО.
- Полученные в результате расчета данные, отправляются в оптимизатор, который осуществляет поиск оптимального значения целевой функции.
Проанализировав данные на входе, оптимизатор отдает в Flypoint Parametrica новую группу параметров и 3D-модель винта моментально перестраивается. Таким образом, цикл замыкается. Во всем процессе оптимизации не требуется контроль извне, что позволяет инженеру сосредоточиться на других задачах. Весь цикл может повторяться десятки и сотни раз – LS-TECH Framework самостоятельно справляется с процессом и всего за несколько часов или дней мы можем получить оптимальный вариант формы лопасти гребного винта.
Результаты оптимизации
Из всей цепочки именно процесс расчёта винта в решателе является самым затратным по времени. Соответственно, чем подробнее сетка, тем дольше мы будем ждать результатов оптимизации. Поэтому не удивительно, что на сетке 14 миллионов ячеек оптимизация заняла ни много ни мало 40 часов (почти два дня!), в то время как на грубой сетке расчёт составил каких-то 4,5 часа. Стоил ли результат таких временных затрат? Давайте разберемся.
По итогам КПД был увеличен на 3,1% на грубой и на 4,5% на подробной сетке при сохранении всех заданных ограничений. Давление в области вращения движителя возросло на 12,8% и 15,2% соответственно, что положительно сказалось на кавитационных характеристиках. Но цифры могут лишь указывать на разность детализации расчётной сетки, а вот изменения в геометрии уже подробнее расскажут об эффективности таких различий в оптимизационном процессе.
Ниже на рисунке 8, представлены графики изменения характеристик по относительным радиусам лопасти, то есть реальные изменения в геометрии. Красным цветом показаны исходные распределения, а голубым и темно-синим – значения параметров, полученные в результате оптимизации. В обоих случаях оптимизатор предлагает изменения схожего характера.
Но настолько ли плохо прошла оптимизация на грубой сетке в сравнении с подробной? Перед тем как давать точный ответ правильнее будет сделать поверочный расчёт: взять модель винта, полученную на экономичной сетке и прогнать её через решатель в подробной.
Таким образом, мы можем порекомендовать проводить оптимизацию на грубой сетке, а результат пересчитывать на подробную сетку, тем самым экономя значительное количество вычислительных и человеческих ресурсов.
Коэффициент полезного действия хоть и был главной точкой интереса, но не единственной. Показатели давления тоже претерпели ряд положительных изменений.
Как мы видим область, что выделена красным цветом, стала значительно меньше. Риск кавитационных эффектов снизился, а значит, оптимизированный вариант винта не только будет лучше работать, но и дольше, по сравнению со своей старой версией.
Подводя итоги оптимизации
Мы смогли получить оптимизированный вариант лопастей винта всего за 4,5 часа! При этом показатели нового движителя значительно улучшились – КПД вырос на 4,7%. Как вы могли убедиться, чтобы достичь подобного результата, нам не понадобились годы разработок и мощь суперкомпьютеров. С использованием Flypoint Parametrica и LS-TECH Framework весь рабочий процесс может уместиться в очень короткие сроки.
Решив проблемы параметризации, 3D-оптимизация стала реальностью, а не просто красивой фантазией. Наша методика параметризации сложных криволинейных форм и управление геометрией в реальном времени позволяет получать результаты быстро и без ручной доработки, тем самым минимизируя человеческий фактор.
Спасибо за внимание! Мы будем рады ответить на все вопросы, возникшие при прочтении статьи. Также просим поставить лайк и подписаться на наш Дзен-канал, чтобы не пропустить полезные материалы о 3D-оптимизации. А если вам нужна помощь с оптимизацией сложных криволинейных форм, смело пишите нам на почту info@ls-technologies.ru. Мы с удовольствием сделаем оптимизацию доступной и удобной для каждого!
‼️Ваш обещанный PDF-БОНУС можно забрать бесплатно по этой ссылке
Возможно вам будет интересно изучить другие наши статьи: