В настоящее время одной из важных задач в судостроении является оптимизация судовых движителей и внешних обводов корпусов судов. Специалисты по всему миру работают над улучшением характеристик объектов морской техники при снижении затрат на их проектирование, строительство и обслуживание. Для этих целей применяются современные технологии математического моделирования и оптимизации.
На примере гидродинамической оптимизации формы лопастей рабочего колеса в насадке мы расскажем о передовой российской технологии трехмерной параметрической оптимизации, которая уже успешно применяется на ведущих предприятиях страны и позволяет добиваться впечатляющих результатов.
В конце статьи вас ждет бонус — PDF-кейс с реальным примером. Узнайте, как параметризация сложных форм может полностью преобразить подход к оптимизации изделий.
«Оптимизация судовых движителей является крайне непростой задачей — комментирует генеральный директор компании «ЛС-Технологии» Любовь Лаврищева, много лет посвятившая работе в области оптимизации объектов морской техники. — Главная проблема заключается в корректной параметризации геометрии лопастей и управлении формой модели в реальном времени и в широком диапазоне параметров. Кроме того, сложность представляет передача геометрии на расчет в автоматическом режиме, то есть без ручной доработки 3D-модели внутри оптимизационной процедуры. Все эти вопросы были нами успешно решены благодаря созданию технологии параметрической 3D-оптимизации на базе программных продуктов собственной разработки. Можно с уверенностью сказать, что наша технология полностью отвечает всем требованиям судостроительной индустрии».
Проблемы параметрической оптимизации в САПР
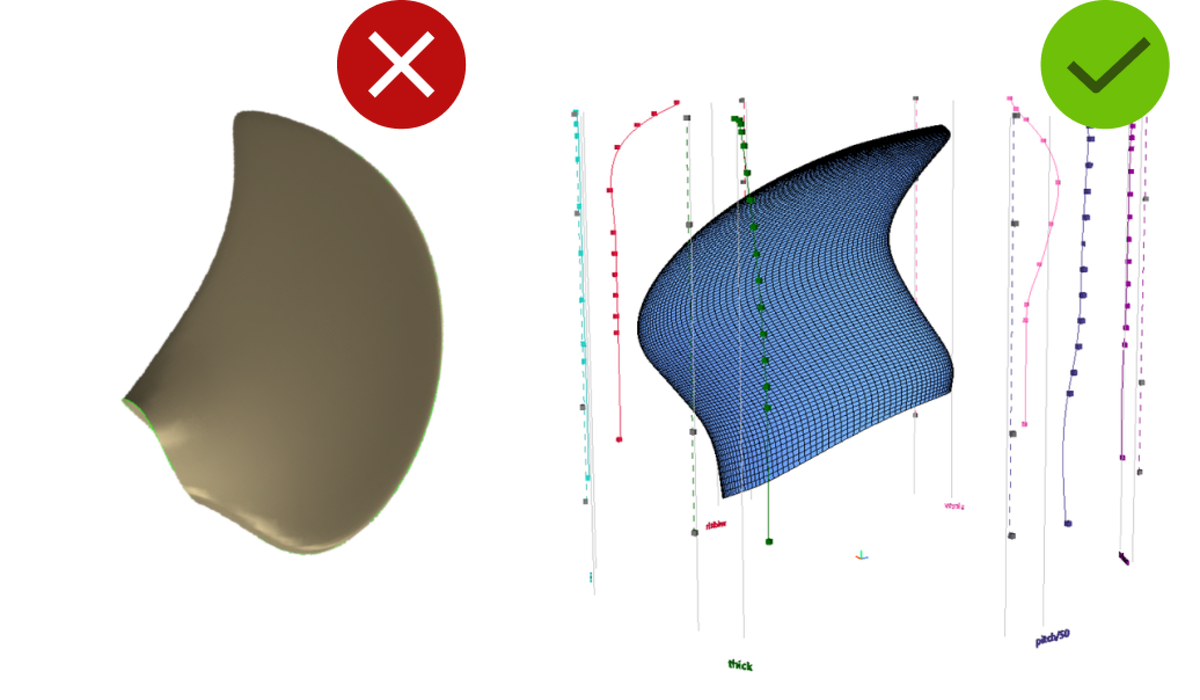
Оптимизация предполагает использование параметрической модели, в которой определены управляемые параметры, изменение которых приводит к улучшению нужных характеристик. Однако одна из основных сложностей — это наличие большого числа исходных точек в математическом описании лопасти – обычно их более 100. Таким количеством точек невозможно быстро управлять ни интерактивно в системах автоматизированного проектирования (САПР), ни с помощью пользовательского программирования под конкретную САПР (так называемый интерфейс прикладного программирования или API), ни через популярные на рынке оптимизаторы. Получается, что в современных инструментах практически отсутствует опция управления сложной криволинейной геометрией в реальном времени и в широком диапазоне параметров.
Кроме того, зачастую даже незначительные изменения в форме лопасти приводят к образованию зазоров между поверхностями, что делает геометрию «нетвердотельной». Такую модель нельзя передать в решатель, пока она не пройдет трудоемкую процедуру «лечения» инженером вручную. Иными словами, такая модель не готова к дальнейшей параметрической 3D-оптимизации в автоматизированном режиме.
Мы нашли решение
Многолетние исследования в области параметризации привели к созданию российского программного продукта Flypoint Parametrica. Он базируется на собственном геометрическом ядре, обеспечивающем свободу выбора управляемых параметров модели и полный контроль над формой изделия. 3D-модель в Flypoint Parametrica всегда параметрическая, легко и быстро перестраивается как в интерфейсе программы, так и через текстовый файл. Поэтому для данного программного продукта не проблема, если геометрия движителя будет меняться на разных этапах проектирования. Построив всего одну полностью параметрическую модель, можно избежать долгого и кропотливого ручного труда в CAD-системе, где каждый раз построение геометрии придется начинать с нуля.
С помощью Flypoint Parametrica можно создать неограниченное количество моделей гребного винта, рабочего колеса, спрямляющего аппарата, насадки и даже внешних обводов корпуса судна. Таким образом, подобный подход к параметризации помогает в несколько раз сократить трудоемкость разработки новых изделий, а также получать самые эффективные движители, исследуя все многообразие их форм.
Постановка задачи и процесс оптимизации лопастей рабочего колеса
Цель гидродинамической оптимизации рабочего колеса – максимизация его КПД на заданном режиме работы. Ограничения установлены на значения упора на лопастях (упор не должен быть ниже исходного значения) и момента на валу (момент не должен превышать исходное значение). В качестве управляемых параметров выбраны 3 параметра по шагу лопасти и 2 параметра по кривизне лопасти с фиксацией на корне лопасти и на концевых сечениях.
Трехмерная параметрическая оптимизация рабочего колеса стала возможной благодаря нашей программной платформе LS-TECH Framework, базирующейся на трех взаимодействующих компонентах:
- Параметрическая модель в Flypoint Parametrica, меняющая свою форму в режиме реального времени, передается в автоматическом режиме в решатель. В данном кейсе это Ansys Fluent, но вы можете подключить любой удобный CFD-пакет.
- В данном решателе также автоматизированы все процессы генерации сетки, расчета и обработки результатов, исключающие участие пользователя внутри каждой оптимизационной итерации.
- Полученные в результате расчета данные, отправляются в оптимизатор который осуществляет поиск оптимального значения целевой функции. В нашем примере мы работали с pSeven, но, как и с решателем, вы можете выбрать любой продукт, например IOSO или Ansys optiSLang.
Более подробно про все шаги оптимизации рабочего колеса мы рассказали в видеоролике ниже.
LS-TECH Framework интегрируется с любыми расчетными средствами, а все процедуры оптимизации, включая генерацию геометрии, построение расчетной сетки, настройку решателя и предварительный анализ результатов на каждой итерации, полностью автоматизированы и не требуют от пользователей экспертных знаний в оптимизации для настройки процесса.
Важно, что платформа LS-TECH Framework входит в Реестр Российского программного обеспечения, а ее разработчик ООО «ЛС-Технологии», является аккредитованной IT-компанией.
Перейдем к результатам оптимизации РК
По результатам оптимизации удалось увеличить КПД рабочего колеса на 6,27% при соблюдении всех заданных ограничений. Этот прирост стал возможен благодаря значительному снижению значения момента – на 5,43%. При этом значение упора осталось неизменным. Отметим, что для данной задачи оптимизатор по умолчанию подобрал 121 итерацию, каждая длилась 14 минут, а весь процесс оптимизации занял 28 часов.
Сравнивая распределения шага и кривизны лопасти рабочего колеса по относительным радиусам до и после оптимизации, мы видим, что оптимизатор увеличил значение шага на корневых радиусах движителя, однако, начиная примерно с несущего 0,7 радиуса напротив уменьшил его значение (рис. 5), тем самым cнизив отрывные эффекты на концевых сечениях лопасти.
Что касается кривизны, то оптимизатор уменьшил ее значение в среднем на 20% по большей части поверхности лопасти рабочего колеса (рис. 6).
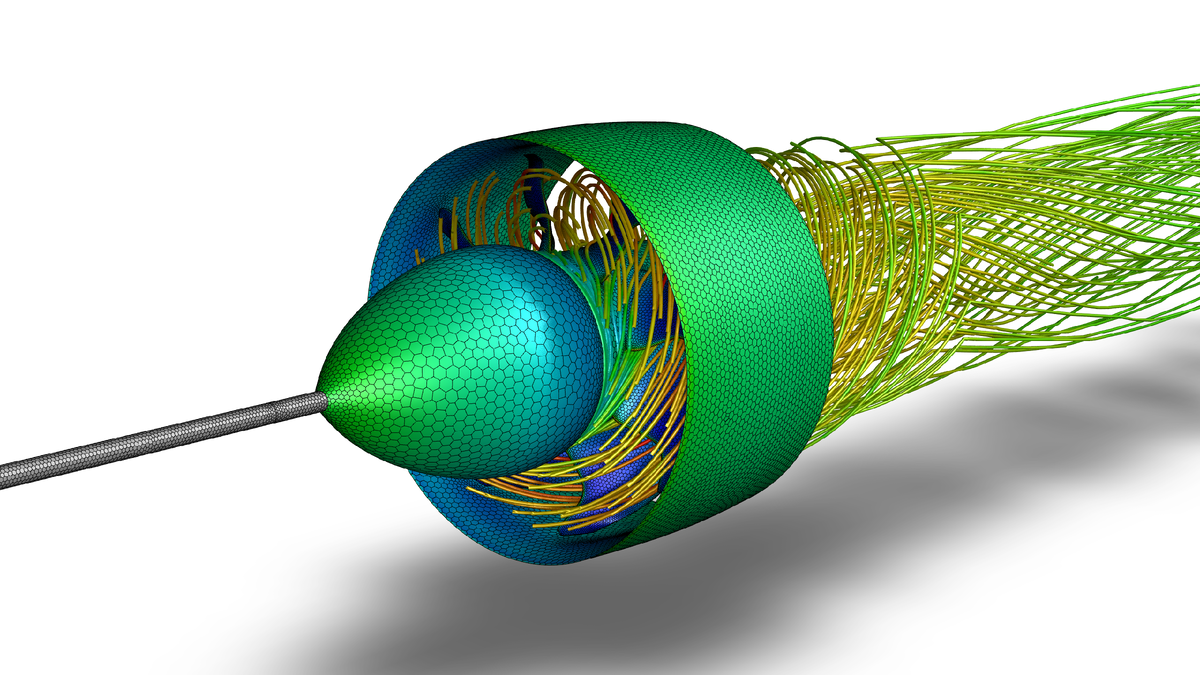
Благодаря параметрической 3D-оптимизации удалось добиться более равномерного распределения давления на поверхности лопастей. Особенно хорошо эти изменения в обтекании видны на нагнетающей стороне лопасти (рис. 7), где зона пониженного давления заметно уменьшилась, что положительно сказалось на гидродинамических характеристиках модели.
Кроме того, анализируя линии тока, раскрашенные модулем скорости, можно заметить, что закрутка потока за лопастями на корневых сечениях в результате оптимизации стала более интенсивная, а значения скоростей увеличились. Это связано с увеличением шага на относительном радиусе r/R=0,5. Также на относительном радиусе r/R=0,9 в результате оптимизации можно наблюдать значительно меньшие скачки в значениях скорости по сравнению с исходным вариантом, а также, в целом, более равномерное обтекание лопастей (рис. 8).
Подведем итоги
Российская технология трехмерной параметрической оптимизации доказала свою эффективность в улучшении характеристик судовых движителей. Оптимизация формы лопастей рабочего колеса в насадке позволила увеличить КПД на 6,27%, при этом снизив момент на 5,43% и сохранив исходный уровень упора.
Такой результат был достигнут благодаря комплексной платформе LS-TECH Framework, которая сочетает в себе автоматизированную работу с параметрической 3D-моделью, численное моделирование и оптимизационные расчеты. Такой подход исключает ручное вмешательство на всех этапах оптимизации, ускоряет процесс проектирования и повышает точность расчетов.
Если вы ищете эффективные решения для сложных инженерных задач в условиях сжатых сроков, наша команда предлагает профессиональные консалтинговые услуги. Мы специализируемся на математическом моделировании, автоматизации процессов и оптимизации, что позволяет нам создавать оптимальные конструкции — от судовых винтов до самолетов со всеми элементами планера.
Наш опыт и продвинутые технологии помогут быстро и точно рассчитать параметры, разработать оптимальные формы и внедрить инновационные подходы, адаптированные под ваши нужды. Доверьте решение ваших задач экспертам из «ЛС-Технологии», чтобы достигать результатов быстрее и эффективнее!
Спасибо за внимание! Подписывайтесь на наш Дзен-канал и ставьте лайк, чтобы поддержать нас и не пропустить новые публикации. Здесь мы регулярно публикуем полезные материалы, рабочие кейсы и видеоролики, которые помогут вам погрузиться в мир параметрической 3D-оптимизации.
‼️Ваш обещанный PDF-БОНУС можно забрать бесплатно по этой ссылке
Возможно вам будет интересно изучить другие наши статьи: