Технология прецизионного позиционирования Macromicro с двухступенчатым приводом с композитным кросс-шкалой является одной из ключевых поддерживающих технологий в областях национальной обороны, аэрокосмической промышленности, прецизионной обработки, биологической науки и прецизионной оптики. С развитием науки и техники технология прецизионного позиционирования имеет растущий спрос на ход и точность системы позиционирования. Технология прецизионного позиционирования Macromicro с двухступенчатым приводом с композитным составом преодолевает технические проблемы, связанные с тем, что традиционной технологии позиционирования с одним приводом трудно достичь большого хода и высокой точности, и имеет большие преимущества в объеме, ходе, скорости отклика, точности позиционирования и других аспектах.
CoreMorrow проводит исследования и разработки, основанные на практическом применении, чтобы преодолеть технические трудности, идеальное сочетание микроплатформы ручной регулировки и пьезо-нанопозиционирующей ступени, ход ступени позиционирования увеличен до десятков миллиметров и может достигать разрешения нанометрового уровня, чтобы соответствовать требованиям различных приложений с большим ходом и высокой точностью.
В этой статье представлена макромикро-композитная двухступенчатая пьезоплатформа с кросс-шкалой H81A.XYZ20S/K. Он может генерировать движение по трем осям с микрометрическим ходом 4 мм на ось и пьезоходом 18 мкм. Физический вид показан на следующем рисунке.
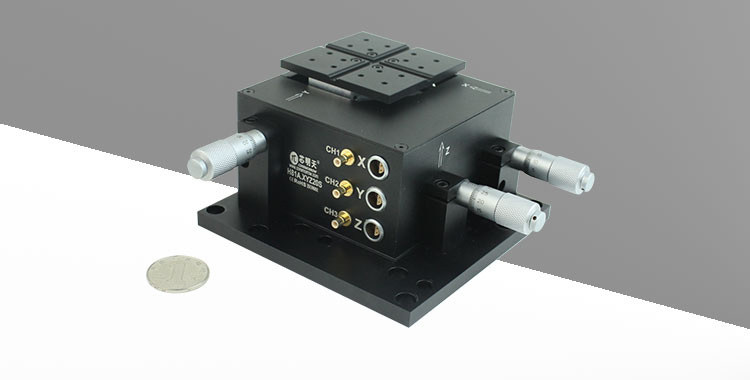
Один конец пьезо-макро-композитной платформы H81A.XYZ20S/K имеет подвижный стол размером 60 мм × 60 мм и 16 отверстий для крепления груза M3 на поверхности подвижного стола. Платформа закреплена на основании размером 112 мм × 112 мм, и на основании имеются 8 сквозных отверстий φ8 мм и 3 φ6,4 мм, чтобы облегчить фиксированную установку пьезо-макро-композитной платформы.

Ручная микрометрическая регулировка в сочетании с пьезо-нанорегулировкой
Пьезо-макро-композитная платформа H81A.XYZ20S/K регулируется ручным микрометром с ходом 4 мм и одним оборотом 500 мкм.
Пьезоприводная часть макромикрокомпозитной платформы приводится в действие пьезокерамикой и управляется сигналом напряжения. Сигнал напряжения подается на пьезокерамику внутри пьезоплатформы пьезоконтроллером CoreMorrow, а соответствующее смещение генерируется пьезокерамикой, а затем передается на подвижный стол гибкой структурой, так что подвижный стол генерирует микро- и нано-микросмещение.
Часть пьезопривода соединена с пьезоконтроллером и пьезомакрокомпозитной платформой через вывод и разъем. Оба конца выводных проводов пьезосистемы соединены разъемами.
Вспомогательный пьезоконтроллер
Пьезоконтроллер серии E01.D3 отлично подходит для управления пьезо макромикрокомпозитной платформой H81A.XYZ20S/K. Он имеет сервомодуль замкнутого контура, который может управляться сервоприводом. Кроме того, он может управляться программным обеспечением верхнего компьютера.
3-канальный пьезоконтроллер серии E70 — это пьезоконтроллер малого объема, который также подходит для управления макромикрокомпозитной платформой H81A.XYZ20S/K piezo. Он также имеет функцию сервопривода с замкнутым контуром и функцию связи с хост-компьютером, и может управляться программным обеспечением сервопривода и хост-компьютера.
Технические данные
Основные параметры пьезо макро/микрокомпозитной платформы H81A.XYZ20S/K, управляемой пьезоконтроллером E01.D3, следующие.
Для получения более подробной информации свяжитесь с нами по телефону 0451-86268790, 17051647888 (идентификатор wechat).



















