В этом уроке мы рассмотрим создание ультразвукового радара с использованием микроконтроллера Arduino, ультразвукового датчика и сервопривода. Этот радар позволит обнаруживать различные объекты, показывать их расположение вокруг себя и их приблизительный рельеф
Компоненты для сборки:
- микроконтроллер Arduino
- HC-SR04 – ультразвуковой датчик расстояния
- Соединительные провода
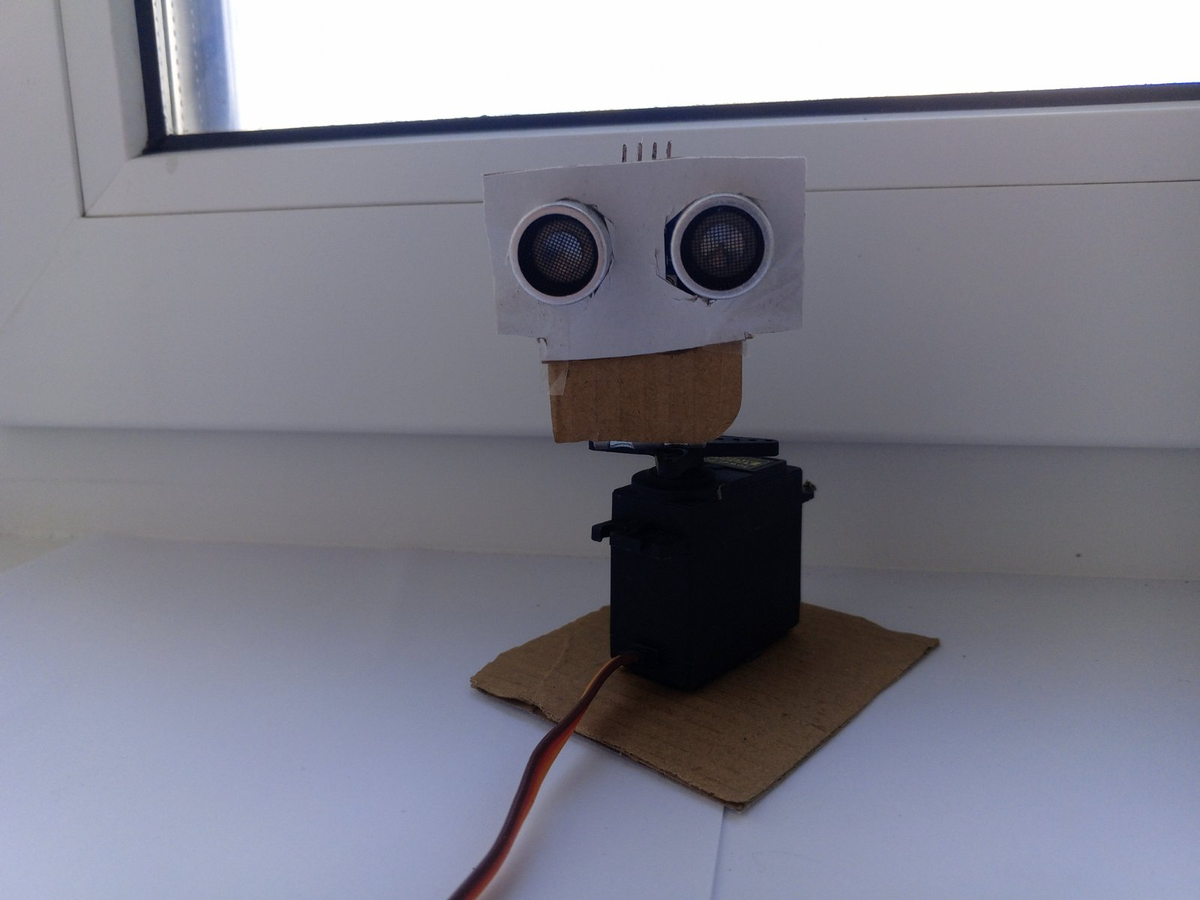
- Крепление для датчика к сервоприводу (Можно использовать что угодно)
Вот так это выглядит у меня:
Переходим к процессу создания необходимых программ
Для начала создадим скетч для Arduino:
Чтобы загрузить наш код в микроконтроллер сначала скачайте необходимые библиотеки (смотрите первую и вторую строки кода)
После загрузки заходим в монитор порта
отправляем любое сообщение и видим значения нашего датчика:
Теперь после этого нужно сделать программу приёма и вывода данных. Делать её будем на языке Python и библиотеке pygame
Заходим в редактор и пишем следующий код:
Библиотеки pygame и serial не являются встроенными и поэтому предварительно установите их с помощью pip
- pip install pygame
- pip install serial
теперь измените COM3 (седьмая строка кода) на нужный вам порт (порт можно узнать при прошивки микроконтроллера)
после проделанных процедур запускаем программу на Python (Arduino должен быть подключён к компьютеру и нужному порту) и смотрим на получившийся результат:
Вот такие результаты мы получили, эту задумку можно использовать по разному, вот некоторые мои идеи:
- Робот-пылесос: определение препятствий и построение карты помещения.
- Обнаружение объектов: создание охранных систем или систем безопасности.
- Управление дроном: определение высоты полёта и препятствий на пути.
- Сканер для определения расстояния до объекта: измерение уровня жидкости или глубины водоёма.
- Тестирование качества продукции: проверка размеров деталей или контроль производственных процессов.