Устанавливать будем GPS-модуль RUSHFPV GNSS mini. Начнём с того, что называть это устройство GPS-модулем не совсем корректно. Для определения координат в таких модулях используется не только спутниковая система GPS, но и другие. Например, в выбранном модуле одновременно используются сигналы от 4 глобальных навигационных спутниковых систем. GPS (Америка), BeiDou (Китай), ГЛОНАСС (Россия) и Galileo (Европейский союз). Далее в тексте будем называть его навигационный модуль.
Назначение навигационного модуля в FPV:
- Позволяет контролировать скорость полета
- Позволяет контролировать расстояние которое пролетел дрон с места взлета
- Позволяет активировать режим GPS Rescue в Betaflight. Возврат дрона на место взлета по координатам. Например, если пропал видеосигнал.
- Позволяет видеть направление на место взлета.
- Позволяет получать информацию о высоте полета. Но информацию о высоте обычно используют с барометра. Он штатно присутствует практически во всех полетных контроллерах.
Комплект поставки
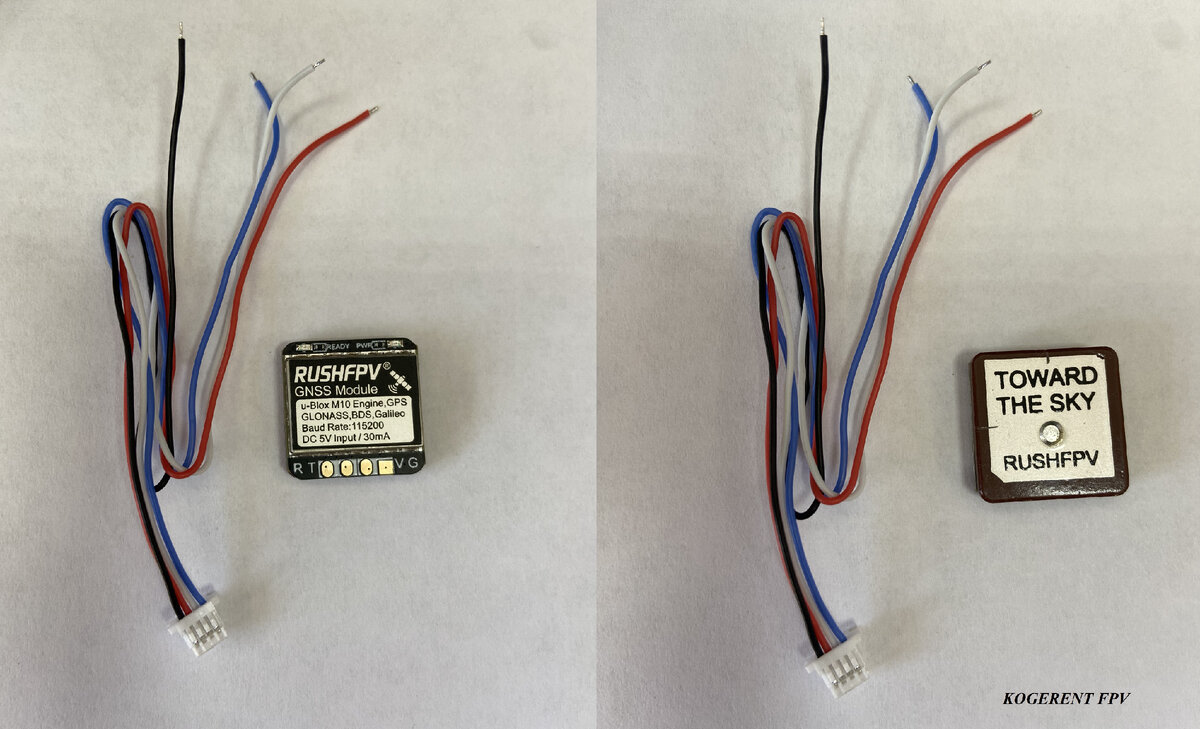
- Навигационный модуль - 1 шт.
- 4-х проводной шлейф - 1 шт.
Примечание. На антенне присутствуют риски, это не повреждения и не брак. Риски нанесены на заводе в процессе настройки и регулировки.
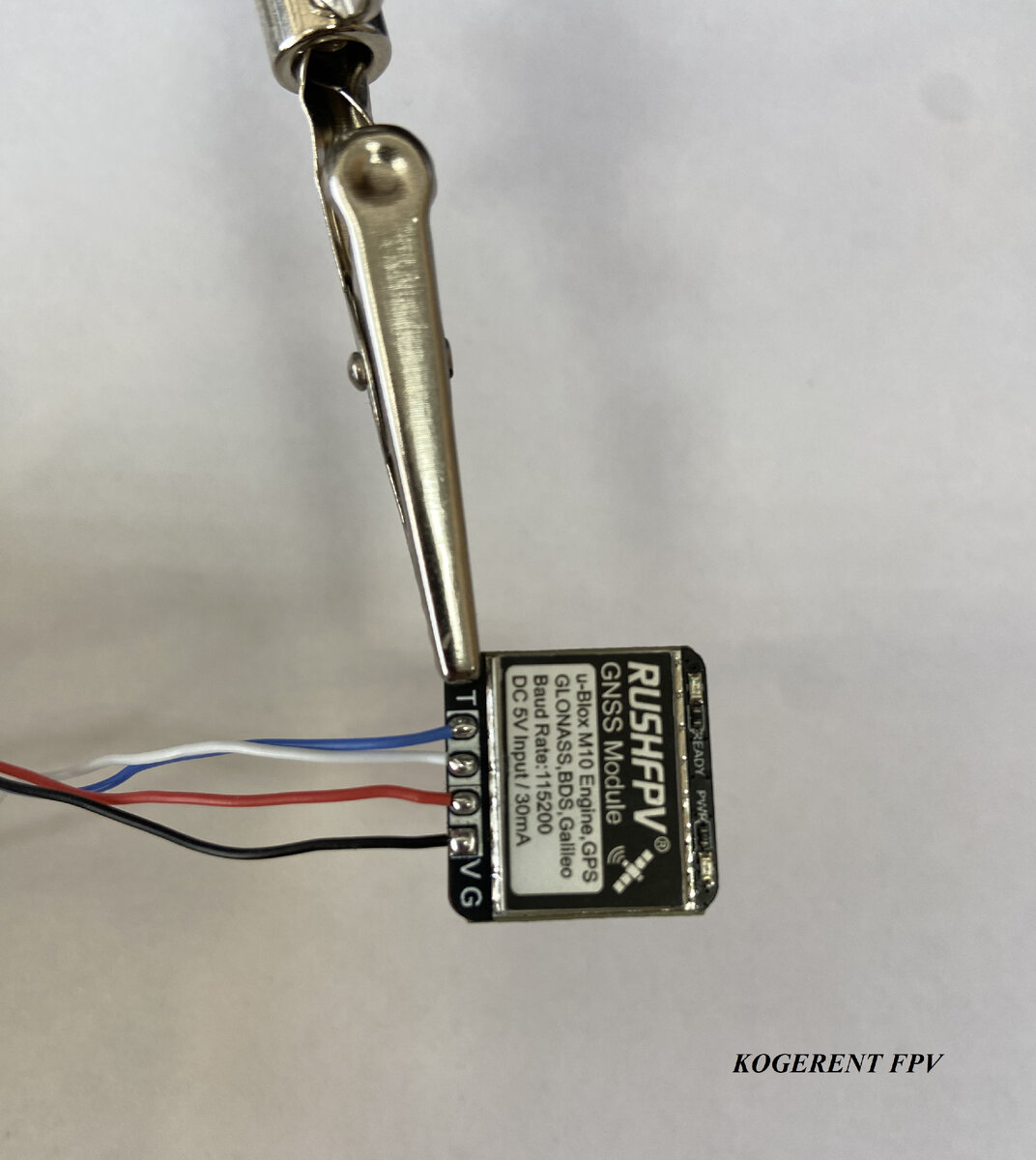
Припаиваем провода к навигационному модулю как показано на рисунке 2.
Для установки навигационного модуля будем использовать деталь изготовленную на 3D-принтере. Ссылка на 3D-модель. Устанавливаем навигационный модуль в напечатанный корпус. Рисунок 3. Дополнительно крепим его на двухсторонний скотч.
Крепиться к раме корпус с модулем будет как показано на рисунке 4, к двум свободным отверстиям под стек 30х30. Используем для крепления два винта М3х8 и две гайки М3.
На полетном контроллере имеем два оставшихся свободными UART-порта, UART1 и UART4. Для подключения навигационного модуля выбираем UART1. Лудим контактные площадки "RX1", "TX1" выбранного порта и питания "+5V", "GND". Рисунок 5.
Далее к площадкам припаиваем провода от навигационного модуля. Синий провод соединяет "RX" навигационного модуля и "TX1" полетного контроллера, белый провод соединяет "TX" навигационного модуля и "RX1" полетного контроллера. Красный провод от навигационного модуля подключаем к "+5V" полетного контроллера, черный к площадке "GND". Рисунок 6.
Навигационный модуль установлен и подключен. На данном этапе дрон имеет вид как на рисунке 7.
Далее в Betaflight на вкладке "Порты" напротив порта UART1 в столбце "Вход датчиков" выбираем "GPS" и скорость 115200 бод. Рисунок 8. Сохраняем и перезапускаем.
На стартовом экране в Betaflight мы увидим что навигационный модуль определился полетным контроллером и показывает текущие координаты. Рисунок 9.
Подписывайтесь.
В следующей статье подготовим дрон к первому полёту. Проклеим провода для предотвращения переламывания и покроем лаком электронные платы дрона.