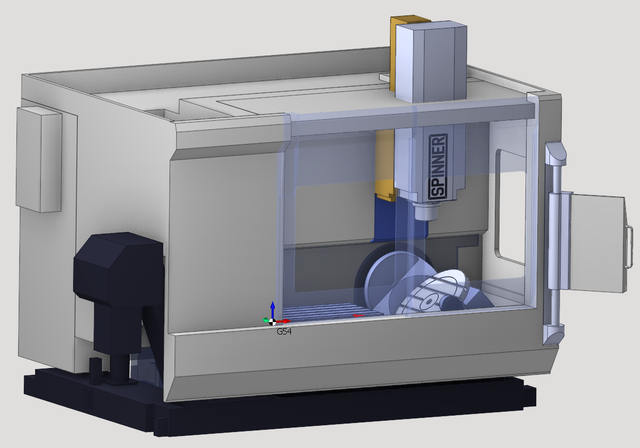
Наш специалист разработал постпроцессор для пятиосевого фрезерного центра Spinner U5 1530, оснащенного стойкой ЧПУ Sinumerik One (Sinumerik 840D). Станок оснащен двумя столами - стационарным и наклонно-поворотным с осями B и C.
Важно отметить, что разработка не ограничилась только постпроцессором - была создана также кинематическая модель самого станка.
Постпроцессор реализует основные функции стойки Sinumerik, в том числе, трансформация СК через CYCLE800, определение параметров точности обработки через CYCLE832, вывод постоянных циклов обработки отверстий CYCLE81-CYCLE86 и прочее.
Особое внимание уделено удобству использования управляющих программ. Постпроцессор учитывает предпочтения клиента в отношении структуры кода управляющей программы. Он позволяет выводить шапку программы с нумерацией траекторий для удобного последующего использования УП через функцию Restart. Кроме того, обеспечивается поддержка вывода подпрограмм, что упрощает организацию и структурирование программы.
Постпроцессор поддерживает вывод параметрической подачи, включая траектории с адаптивной подачей. Как работает адаптивная подача в SprutCAM, представлено на видео ниже:
Ниже приведен фрагмент кода УП, генерируемый с использованием постпроцессора Spinner U5:
R31=1200 ; Approach
R32=R31 ; Working
R33=R31 ; Next
R34=R31 ; Finish
<...>
G1 X-14.73 Y-79.48
X-12.803 Y-77.337 F=R32*0.9
X-11.446 Y-75.828 F=R32*0.8
X-10.926 Y-75.249 F=R32*0.7
G3 X-10.457 Y-74.701 I=AC(-71.538) J=AC(-22.854)
X-9.601 Y-73.676 I=AC(-71.538) J=AC(-22.854) F=R32*0.6
X-8.717 Y-72.58 I=AC(-71.538) J=AC(-22.854) F=R32*0.5
X-7.789 Y-71.384 I=AC(-71.538) J=AC(-22.854) F=R32*0.4
X-6.707 Y-69.929 I=AC(-71.538) J=AC(-22.854) F=R32*0.3
X-5.225 Y-67.817 I=AC(-71.538) J=AC(-22.854) F=R32*0.2
X-3.589 Y-65.305 I=AC(-71.538) J=AC(-22.854) F=R32*0.1
X-3.517 Y-65.189 I=AC(-71.538) J=AC(-22.854) F=R32*0.2
X-3.445 Y-65.072 I=AC(-71.538) J=AC(-22.854) F=R32*0.3
X-3.373 Y-64.956 I=AC(-71.538) J=AC(-22.854) F=R32*0.4
X-3.301 Y-64.839 I=AC(-71.538) J=AC(-22.854) F=R32*0.5
X-3.229 Y-64.723 I=AC(-71.538) J=AC(-22.854) F=R32*0.6
X-3.158 Y-64.606 I=AC(-71.538) J=AC(-22.854) F=R32*0.7
X-3.086 Y-64.489 I=AC(-71.538) J=AC(-22.854) F=R32*0.8
X-3.015 Y-64.372 I=AC(-71.538) J=AC(-22.854) F=R32*0.9
X-0.002 Y-58.932 I=AC(-71.538) J=AC(-22.854) F=R32
<...>
Разработанное решение открывает новые возможности для станка Spinner U5 1530 со стойкой ЧПУ Sinumerik One. Комбинация постпроцессора и кинематической модели позволит технологам эффективно использовать станок, достигать высокой точности и повысить производительность обработки.



















