
Феноменальный успех российского барражирующего боеприпаса «Ланцет» от фирмы ZALA в ходе его применения в СВО, определяется не только его высокими тактико-техническими характеристиками, но и отсутствием у нашего противника современной и разветвленной системы РЭБ. Известно, что наиболее уязвимыми у дистанционно пилотируемых летательных аппаратов являются – система спутниковой навигации и канал обмена данными с пунктом управления. Если парализовать их работу, то БПЛА превращается в бесполезное оружие, не способное нанести противнику сколько-нибудь существенный ущерб. Именно поэтому, разработчики перспективных БПЛА стремятся оснастить их системой управления на основе искусственного интеллекта, что делает БПЛА практически неуязвимым от радиоэлектронных средств противодействия. Вопрос заключается в том, можно ли создать в современных условиях полностью автономный БПЛА или нет?
Фирма ZALA - разработчик БПЛА «Ланцет», анонсировала создание и запуск в производство БПЛА «Изделие 55», который по сообщению ZALA способен самостоятельно искать цель в заданном районе и затем поражать ее. Насколько утверждение фирмы-разработчика соответствует истине, попробую разобраться в этой статье.
В конце 80-х годов прошлого века в СССР в рамках НИЭР «Подвиг» разрабатывался дистанционно управляемый беспилотный привязной вертолет (БПВ).
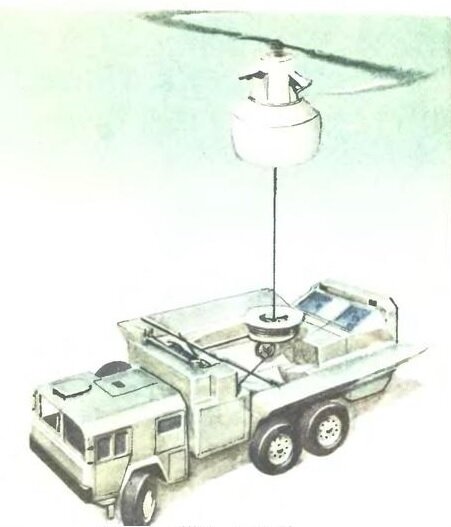
Мне довелось участвовать в этом проекте. БПВ был лишен тех недостатков, которые присущи современным БПЛА, так как его канал обмена информацией между вертолетом и пунктом управления был неуязвим для средств РЭБ противника. Все данные у БПВ передавались по оптоволоконному кабелю. Основным недостатком такого решения было то, что вертолет мог удаляться от пункта управления на расстояние не более 1,5 – 2 километров. Для ведения разведки у линии боевого соприкосновения этого было вполне достаточно, но, чтобы вести разведку в глубоком тылу противника, такое техническое решение не годилось.
Несмотря на то, что БПВ «Подвиг» создавался более тридцати лет назад, у него имелись такие функции, как автоматическое определение цели и автосопровождение цели. То есть те функции, которые разработчики ZALA сейчас реализовали в своем «Изделии 55». Поэтому говорить, что сейчас в производстве БПЛА совершается какой-то революционный прорыв, было бы ошибкой. Ведь, как известно… все новое, есть хорошо забытое старое. Другое дело, что эти функции в БПЛА «Изделие 55» могут быть реализованы на современном технологическом уровне.
Как же самостоятельно определял цель БПВ «Подвиг»? В памяти бортового компьютера (который находился на мобильном пункте управления – «МТ-ЛБУ») находилась база данных с фотоснимками образцов вооружения вероятного противника. Эти образцы вооружения (танки, БМП, ракетные установки, САУ) были сняты под разными углами. Если какой-то объект попадал в поле зрения видеокамеры, то оператор наводил на него оптическую ось видеокамеры и затем включал режим автоматического определения цели. Контур обнаруженной цели попеременно накладывался на фотографию-эталон, хранящуюся в базе данных. При этом, сравнивалась их площадь. Если разница в площадях была меньше, чем некоторая пороговая величина, то принималось решение, что обнаруженная цель и эталон совпадают. Такая процедура занимала довольно много времени, несмотря, на то, что база данных образцов вооружения у БПВ «Подвиг» была сравнительно небольшой.
Приблизительно по такому же алгоритму сейчас работают компьютерные программы распознавания текста. Как известно распознают они далеко не все. Поэтому описанный выше метод несовершенен и обладает большим количеством недостатков.
Более совершенный метод распознавания различных объектов реализован в системах управления крылатыми ракетами. Например, у американских ракет есть система TERCOM (система отслеживания рельефа местности). В бортовой компьютер ракеты заложены космические фотоснимки отдельных участков местности, через которые по пути к цели должна пролететь ракета. Подлетая к ним, ракета поднимается на определенную высоту и фотографирует участок местности под собой. Затем, полученная фотография сопоставляется с той, которая хранится в бортовом компьютере. Сравнивая эти снимки, можно определить отклонение ракеты от маршрута.
В Московском Метрополитене в настоящее время работает автоматическая система распознавания лиц. Принцип ее работы следующий. Специальный алгоритм по видеоизображению человека определяет геометрические пропорции его лица. Затем, в базе данных ищутся похожие лица. Чтобы быстро «узнать» человека в толпе необходимы гигантские вычислительные мощности. Поэтому сигналы от видеокамер передаются по оптоволоконным кабелям в специальные центры обработки данных.
Другим примером современного автоматического распознавания объектов являются автомобили-беспилотники. Такие автомобили, например, создает американская фирма TESLA. Но здесь следует сразу оговориться, что видеонаблюдение в управлении автомобилем играет второстепенную роль. В основном, положение автомобиля на дороге определяется лазерными и радиолокационными сканерами. Видео в этом случае нужно, чтобы различать сигналы светофора. То есть полноценных алгоритмов, которые копировали бы зрение человека и в этом случае пока не создано.
Почему же разработчики «Изделия 55» утверждают, что их БПЛА может самостоятельно выполнять разведку целей на поле боя? По моему мнению они имеют в виду следующие его функции. После обнаружения цели оператором, головка самонаведения БПЛА захватывает ее и далее наводится на цель самостоятельно. Ничего новаторского в таком решении нет. По такому принципу, например, наводится американская противотанковая ракета JAVELIN. Только вместо видеокамеры в ней используется инфракрасная. Системой автоматического сопровождения цели был оснащен и советский БПВ «Подвиг», который был создан еще в конце 80-х годов.
Создать полностью автономный БПЛА в настоящее время мешают размеры и вес бортового компьютера, который понадобится для этого. Если их удастся уменьшить до требуемых размеров, тогда применение на поле боя летающих роботов станет реальностью.
Другие публикации на эту тему:
1. Армейский рукопашный бой. Уроки СВО…
2. Уроки СВО… Почему приходится закупать для российской армии квадрокоптеры?
3. Уроки СВО… «Блеск» и «нищета» российского ВПК
4. Уроки СВО… Гонка за «искусственным интеллектом»
5. Уроки СВО... Как нам утолить "снарядный голод"
6. Уроки СВО… Сможет ли российский ВПК выиграть технологическую гонку с Западом?
7. Возможна ли новая индустриализация в России?
8. Уроки СВО... Каким быть российскому ВПК - частному или государственному?
9. Уроки СВО... Кто заплатит за победу?
10. Ракета "Шквал" бесполезна?..
11. "Барракуда" - секретное оружие ВМС НАТО?..
12. За каким секретом охотился американский шпион Эдмонд Поуп?
13. Что не так с ракетой "Шквал"...
14. Какая торпеда лучше - "Орел" или "Безмолвие"?
15. Легко ли потопить современную подводную лодку?
16. Как рождался российский гиперзвук...
17. Почему БПЛА "Ланцет" производится не авиационной промышленностью России?
18. Уроки СВО... Как защитить Черноморский флот от украинских дронов?