Перенесемся ли мы когда-нибудь в фантастический мир, где во время автопоездки будем спать или пить горячий кофе, пока автопилот следит за нашей безопасностью? Уже сейчас автомобильные компании работают над самоуправляемыми автомобилями, чтобы подарить нам такое будущее. Особенно актуальна данная технология в Китае и США, над ней работают стартапы Nio, XPeng, Li Auto, а также крупные компании Tesla и Geely Group. Но есть ли у самоуправляемых автомобилей реальное будущее? Давайте разбираться.
На каком этапе развития находятся технологии автопилота сейчас?
Чтобы понять текущий этап развития технологий, обратимся к классификации уровней автопилота, сейчас выделяют шесть таких уровней – от «нулевого» до «пятого». Кратко расскажем о них.
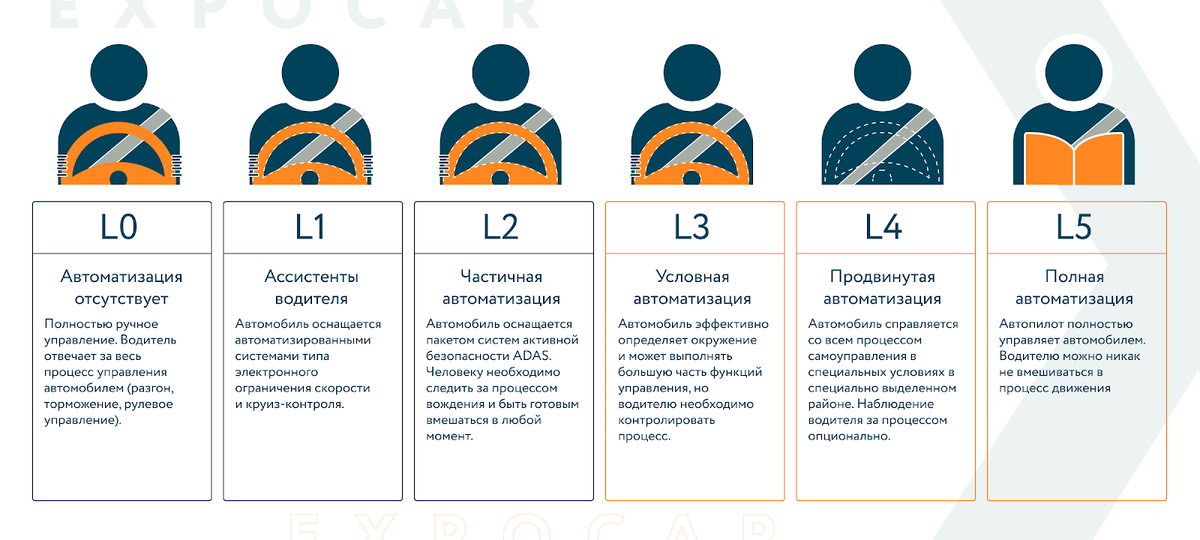
Нулевой уровень (L0) – отсутствие технологий умного вождения как таковых, когда всё управление автомобилем лежит на плечах водителя. Нам всем, пожалуй, знаком такой уровень технического оснащения.
Первый уровень (L1) – базовые автоматические системы автомобиля типа электронного лимита скорости и круиз-контроля. Транспортное средство с такой системой уже может удерживать определённую скорость, за остальное отвечает водитель. Эти возможности встречаются на машинах довольно давно. Раньше они были достоянием премиального сегмента, а теперь доступны и на борту массовых моделей.
Второй уровень (L2) – система активных ассистентов безопасности ADAS. С её помощью автомобиль может самостоятельно регулировать скорость, парковаться и тормозить перед препятствиями. Особо «умные» автомобили могут самостоятельно перестраиваться и двигаться по городским улицам, объезжая препятствия. При этом водителю необходимо постоянно следить за обстановкой вокруг.
Третий уровень (L3) – высокая автоматизация, при которой автомобиль может самостоятельно выполнять большую часть возможных манёвров. С такой системой водитель может указать пункт назначения, а транспортное средство доедет до него самостоятельно. При этом водителю всё ещё нужно контролировать процесс, в экстренных случаях вмешиваясь в ситуацию
Четвёртый уровень (L4) – практически полная автоматизация, которая позволяет автомобилю эффективно реагировать на все дорожные ситуации в рамках отдельно выделенной области, например района или города. В таком случае человек может лишь частично наблюдать за маршрутом.
Пятый уровень (L5) – полная автоматизация в любых дорожных условиях. Такому автомобилю не нужен руль, а водителю можно не следить за процессом движения.
На данный момент индустрия автопилотируемых транспортных средств находится на промежуточном уровне развития между L2 и L3. Многие автомобили мейнстрим-сегмента уже могут предложить систему активных ассистентов безопасности. К их числу относятся знакомые россиянам OMODA S5, OMODA C5, Chery Tiggo 4 PRO, Chery Tiggo 8 PRO MAX и другие модели.
Продвинутые модели уже ориентируются в пространстве с помощью высокотехнологичных сенсоров LiDAR, множества камер и специальных спутников на орбите Земли. Автомобили могут самостоятельно перемещаться в заданную точку, но за ними нужен строгий надзор. Тем не менее в том же Китае ряд автопроизводителей уже начал тестирование систем автономного вождения L3. К ним относятся Mercedes-Benz и IM Motors от SAIC. Сейчас производители автомобилей с продвинутой системой автономного вождения оценивают свои системы на уровень L2.5, намекая, что до повышенной автономности осталось немного. Примером автомобиля с системой автономного вождения L2.5 является кроссовер SKYWELL ET5.
Особняком стоят стартапы по разработке технологий автономного вождения типа Waymo, Apollo, Pony.ai и другие. Их машины предлагают широкий спектр автономных возможностей на уровне L4, но в строго ограниченной зоне. А их массовое применение на дорогах пока под вопросом.
Будущее и проблемы технологий автопилота
Как стало понятно из классификации, автопроизводители и разработчики систем автономного вождения стремятся к полной автономности, то есть к уровню L5. Но пока на повестке дня стоит вопрос освоения и распространения хотя бы уровня L3. И достижению этой планки мешают несколько проблем.
Прежде всего, у разработчиков систем автопилота нет единого понимания того, как эти системы должны работать. Например, китайские стартапы NIO, XPeng и Li Auto полагаются на сенсоры LiDAR как основной источник сканирования окружающей среды. А Tesla и Apollo полагаются на видеокамеры высокого разрешения. Каждый лагерь стойко пытается доказать свою правоту, вместо того чтобы нащупать общее направление развития.
Ещё одно препятствие на пути построения эффективной системы автономного вождения L3 связано с тем, что для её реализации ряд производителей запускает в космос спутники. С их помощью система высокоточного позиционирования позволяет автомобилю определять своё местоположение с точностью до сантиметра. В результате транспортное средство может эффективно маневрировать в потоке и ориентироваться на городских улицах. Но запуск спутников в космос – дорогостоящее занятие. К тому же, ряд стран будет против того, чтобы над ними кружили «чужие» спутники.
Специалисты говорят, что для эффективного применения системы автономного вождения L3 и выше автомобилям необходимо постоянно обмениваться сигналами друг с другом, сообщая о своих «планах». В таком случае вероятность аварий будет резко снижена, ведь все машины будут объединены в систему. Но такой сценарий развития маловероятен, ведь для этого необходимо создать единый стандарт «общения» для всех автомобилей.
Ещё одна проблема – юридическая. Приведём пример. Если автомобиль с уровнем автопилота L2 и ниже попал в аварию, то в Китае по закону виноват в этом только водитель. Но если в аварию попадает транспортное средство с системой уровня L3, вина будет разделяться между водителем и системой автономного вождения. И в таком случае становится непонятно, кто будет нести ответственность: разработчик системы на аутсорсе, сам производитель или конкретный инженер. Пока компании не хотят заходить в это поле, чтобы не рисковать своей репутацией и денежными средствами. А законодатели ломают голову над этой юридической дилеммой.
Тем не менее многие с оптимизмом смотрят в будущее автопилота. Например, основатель китайского стартапа NIO считает, что через 20 лет в Китае не будет аварий, благодаря тому что автомобили будут оснащены продвинутыми системами автономного вождения. А ещё через несколько лет – и во всём мире. Но стоит помнить о том, что на дорогах всегда будут велосипедисты, самокатчики, водители мотоциклов и скутеров, а также обычные пешеходы. Поэтому перспектива безаварийных поездок выглядит утопией.
А что вы думаете о будущем технологий автопилота? Будем ли мы через пару десятков лет задумчиво читать книжку, смотреть фильм, работать или дремать во время движения автомобиля, не нарушая при этом закон и не рискуя собственной жизнью? Пишите в комментариях!