OttoDIY - увлекательный проект по созданию открытого и доступного для всех робота, который можно собрать своими руками. В этой заметке мы рассмотрим основные шаги сборки, необходимые компоненты и дадим некоторые рекомендации для успешного завершения проекта. Инструкция по созданию робота Отто PDF для Смартфона: OttoDIY_InstructionsManual_V09 - скачать Шаги сборки: Основные моменты: Ссылки на дополнительные ресурсы: Завершение: Собрав робота OttoDIY, вы открываете мир интерактивной робототехники. Пользуйтесь ресурсами сообщества и не забывайте делиться своими творениями! Советуем перейти на оригинал статьи, там больше материала.
OttoDIY - увлекательный проект по созданию открытого и доступного для всех робота, который можно собрать своими руками. В этой заметке мы рассмотрим основные шаги сборки, необходимые компоненты и дадим некоторые рекомендации для успешного завершения проекта.
Инструкция по созданию робота Отто PDF для Смартфона: OttoDIY_InstructionsManual_V09 - скачать
Шаги сборки:
- Тестирование и отладка: Проверьте работу каждого сервопривода и датчика.
Используйте отладочные инструменты Arduino IDE для устранения возможных проблем. - Доработки и улучшения:
Экспериментируйте с программой для создания различных движений.
Добавьте дополнительные функции, такие как распознавание объектов или звука.
Основные моменты:
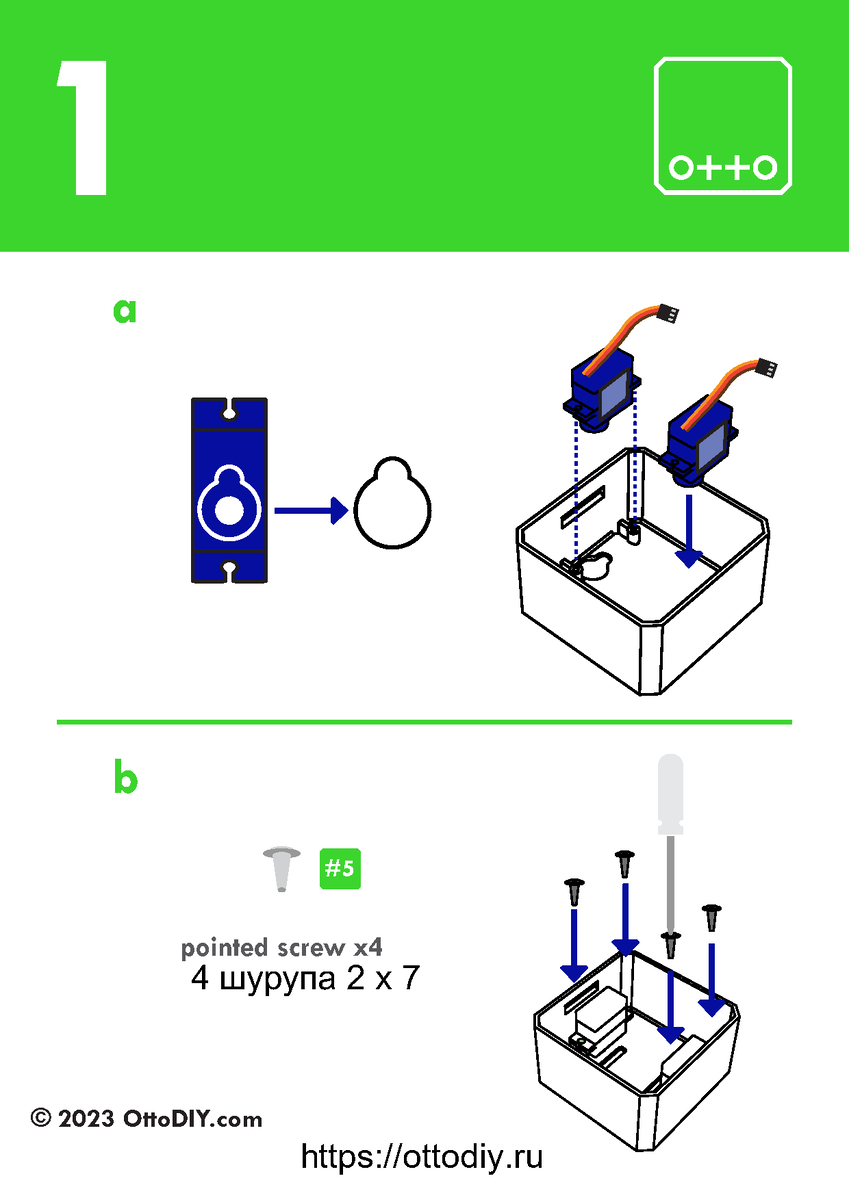
- Инструменты: Обычная отвертка - единственный необходимый инструмент для сборки.
- Время сборки: Возможность собрать робота за два часа.
- Функциональность: Ходит и танцует (walk & dance).
Обнаруживает и избегает препятствий.
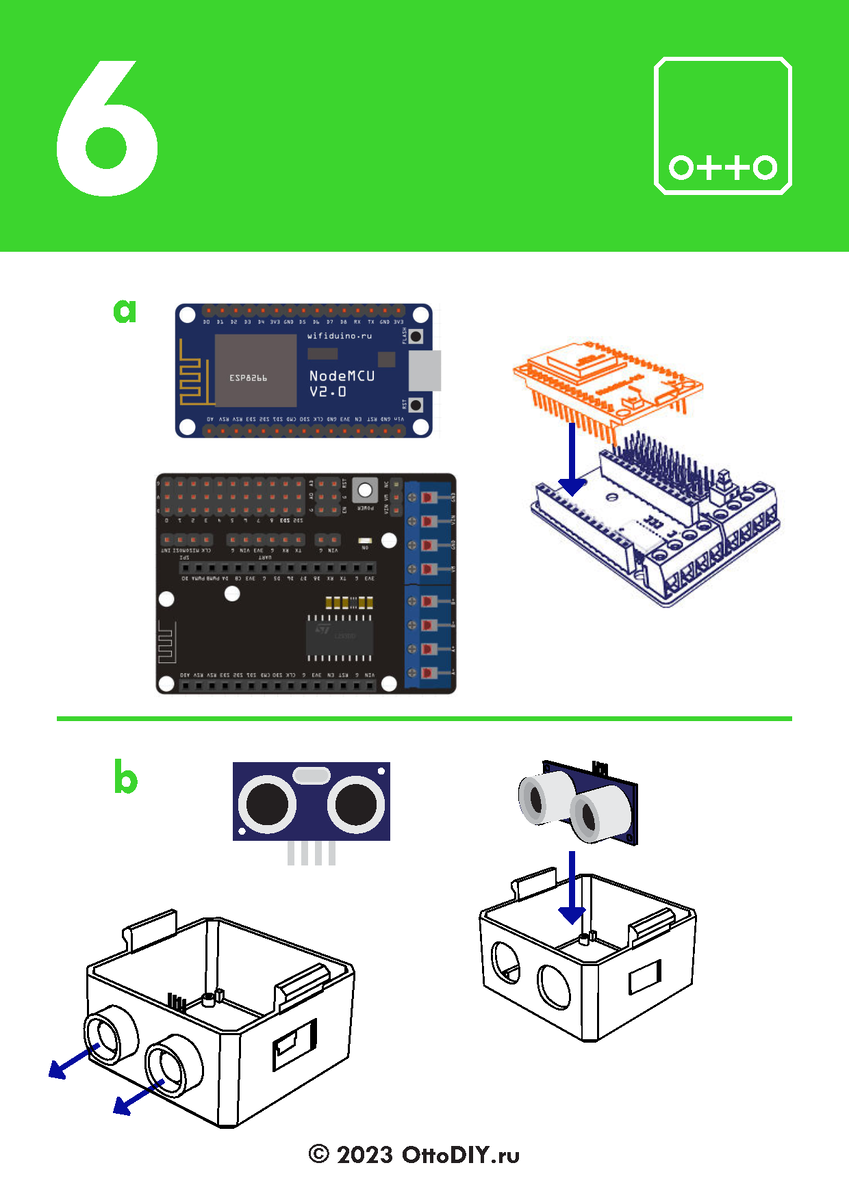
Легко программируется. - Необходимые компоненты: Плата Arduino ESP8266.
Сервоприводы, датчики ультразвука.
3D-напечатанное тело и детали.
Дополнительные компоненты, такие как зуммер, моторшилд. - Программирование: Программу для управления роботом можно скачать по ссылке: https://ottodiy.ru/soft/ottoblockly.Setup.1.5.0.exe
- Блочное программирование: Используйте среду Otto Blockly для визуального программирования.
- Важные моменты: Выставите сервоприводы в центральное положение (90°).
Будьте внимательны при креплении внутри ног. - Дополнительные возможности: Робот расширяем и настраиваем с использованием 3D-печати и подключения дополнительных датчиков.
- Пост-программирование: Робот может работать от портативного аккумулятора(powerbank).
Ссылки на дополнительные ресурсы:
Завершение:
Собрав робота OttoDIY, вы открываете мир интерактивной робототехники. Пользуйтесь ресурсами сообщества и не забывайте делиться своими творениями!
Советуем перейти на оригинал статьи, там больше материала.