Управление многоосным роботом относится к процессу управления движением, положением и задачами роботов с несколькими осями движения или суставами. Многоосные роботы обычно состоят из нескольких двигателей и соединений, что позволяет им перемещаться и выполнять различные задачи с несколькими степенями свободы. Многоосные роботы широко используются в промышленности, производстве, здравоохранении, армии и сервисных роботах для повышения эффективности производства и выполнения различных задач.

Основные основные моменты многоосного контроллера робота заключаются в следующем:
Совместное управление. Суставы многоосного робота являются основными элементами его движения и обычно приводятся в движение двигателями. Управление каждым суставом включает установку целевого угла или положения для достижения желаемого движения.
Управление с обратной связью: многоосные роботы часто оснащаются такими датчиками, как энкодеры, инерциальные датчики и датчики машинного зрения, для обеспечения обратной связи в режиме реального времени. Управление с обратной связью позволяет роботу исправлять ошибки движения и корректировать свое положение и положение с учетом нестабильности или внешних возмущений.
Управление задачами: управление многоосным роботом также предполагает выполнение различных задач, таких как захват, сборка, сварка, покраска и т. д. Для управления задачами часто требуются расширенные алгоритмы управления и планировщики для реализации сложных последовательностей действий.
Режим программирования: многоосными роботами можно управлять с помощью различных методов программирования, включая ручное программирование, автономное программирование, программирование на основе обучения и автоматическое программирование. Каждый метод имеет свои применимые сценарии и преимущества.
Безопасность. Безопасность очень важна при управлении многоосным роботом. Роботы должны быть спроектированы и эксплуатироваться таким образом, чтобы предотвращать опасные ситуации, а также иметь средства экстренной остановки и обнаружения столкновений.
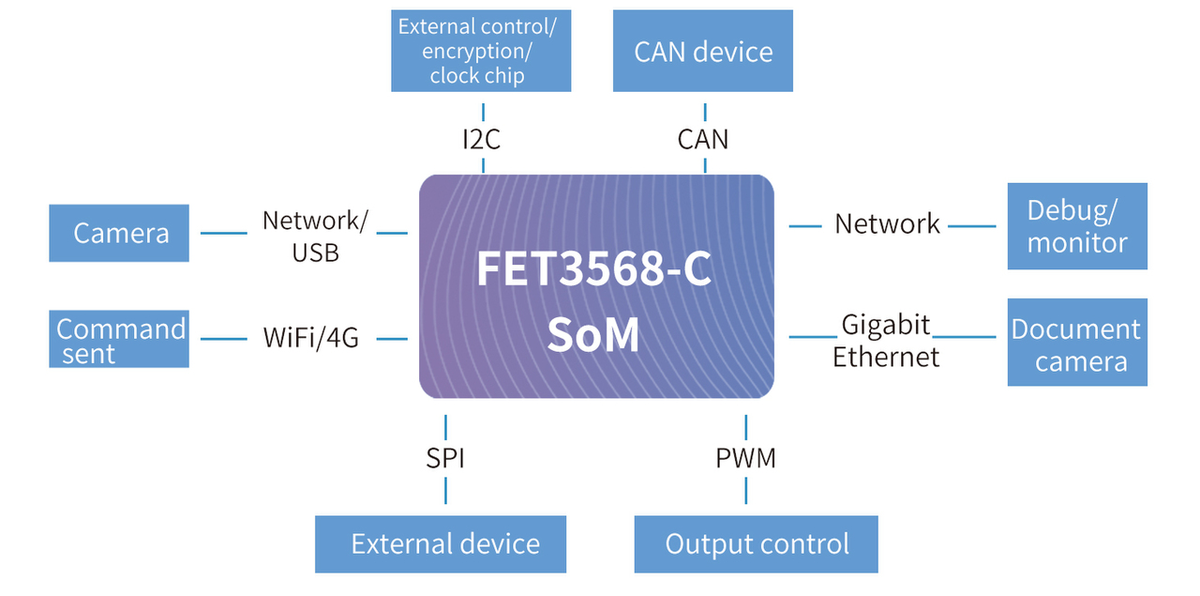
Основываясь на этом, Forlinx представляет компьютер FET3568J-C на модуле , который оснащен четырехъядерным 64-битным процессором промышленного класса Cortex-A55 с основной частотой до 2,0 ГГц и имеет внутреннюю интеграцию арифметического NPU 1TOPS.
С вытесненным патчем rt87 система в режиме реального времени: 10 ~ 50 мкс может соответствовать различным приложениям в промышленной области для требований реального времени.
Богатые функциональные интерфейсы: 2 канала Gigabit Ethernet, 3 канала PCLE, 4 независимых канала USB, 3 канала SATA3.0, 10 каналов UART и т. д.
Он обладает мощными возможностями обработки мультимедиа и изображений, поддерживает жесткое декодирование высокой четкости в различных форматах, объединяет двухъядерный графический процессор и поддерживает все основные современные API изображений.
Использование архитектуры ARM для реализации контроллера имеет множество преимуществ, в том числе:
Низкое энергопотребление. Процессоры ARM обычно имеют низкое энергопотребление, что делает их идеальными для встраиваемых систем и мобильных устройств, особенно для приложений, требующих длительного времени работы. Низкое энергопотребление помогает продлить срок службы батареи и снизить энергопотребление устройства.
Высокая производительность: хотя процессоры ARM имеют низкое энергопотребление, они по-прежнему обеспечивают отличную производительность. Различные конструкции ядер ARM подходят для различных приложений: от микроконтроллеров с низким энергопотреблением до высокопроизводительных многоядерных процессоров, которые могут удовлетворить потребности в производительности различных приложений контроллера.
Многоядерная обработка: процессоры ARM поддерживают многоядерную обработку, что означает, что они могут интегрировать несколько вычислительных ядер на одном кристалле для параллельной обработки и повышения производительности. Это полезно для контроллеров, которым необходимо обрабатывать несколько задач или входные сигналы от нескольких датчиков.
Гибкость. Архитектура ARM очень гибкая и может быть настроена в соответствии с потребностями приложения. Архитектура ARM очень гибкая и может быть настроена в соответствии с потребностями приложения.
Поддержка экосистемы: ARM имеет обширную экосистему инструментов разработки, операционных систем, приложений и сторонней поддержки. Это упрощает разработку и обслуживание систем на базе контроллеров ARM.
Экономическая эффективность: процессоры ARM обычно относительно дешевы из-за широкого распространения и стандартизации архитектуры ARM. Это снижает производственные затраты и помогает создавать конкурентоспособные продукты контроллеров.
Широкий спектр приложений: процессоры ARM подходят для широкого спектра приложений, включая встроенные системы, Интернет вещей (IoT), автомобилестроение, промышленную автоматизацию, медицинские устройства, бытовую электронику и устройства связи. Это означает, что процессор ARM можно повторно использовать в различных приложениях контроллера.
Безопасность. Процессоры ARM обеспечивают функции безопасности на аппаратном уровне, которые защищают устройства от вредоносных атак и утечки данных. Это важно для приложений контроллера, которым требуется высокая степень безопасности.
Первоначально опубликовано на www.forlinx.net.