Система управления роботами является ключевым компонентом современной робототехники, позволяя роботам выполнять различные задачи и действия, начиная от промышленного производства и заканчивая здравоохранением и даже бытовыми услугами. Система управления роботом подобна мозгу робота и является основным компонентом, определяющим его функции и производительность. Обычно она состоит из четырех основных частей: контроллера робота (управление движением), сервоприводов, модулей ввода-вывода и системы питания.
В этой статье мы рассмотрим основные особенности системы управления роботом и SoM промышленного класса FET3568J-C, рекомендованный Forlinx Embedded в качестве основной платформы управления для контроллера робота. Дайте нам представление о важности систем управления роботами и их применении в современной робототехнике.
К основным функциям системы управления роботом относятся:
Планирование пути и управление движением . Система управления отвечает за планирование пути робота, чтобы он мог перемещаться по окружающей среде и предпринимать соответствующие действия.
Объезд препятствий и безопасность : система управления может обнаруживать препятствия и принимать меры для предотвращения столкновений. Он также может реализовать программу аварийной остановки для обеспечения безопасности робота.
Реализация миссии : системы управления роботами могут выполнять различные задачи, включая сбор и размещение объектов, сборку, сварку, очистку, геодезию и многое другое.
Автономность : система управления автономных роботов обладает возможностями принятия решений, что позволяет им самостоятельно выполнять действия в зависимости от окружающей среды и поставленных задач без необходимости вмешательства человека.
Связь . Системы управления обычно взаимодействуют с другими устройствами или операторами для получения команд, отправки отчетов о состоянии или запроса помощи.
Контроллер робота является основной частью робота, в основном контролирующей положение, положение и траекторию движения робота в рабочем пространстве, а также последовательность операций и т. д.; каждый сустав робота должен синхронизировать и координировать работу в реальном времени, а для реализации этих сложных действий незаменим сервопривод; модуль ввода-вывода связывает цифровые входные сигналы с сигналами управления системой, чтобы он мог осуществлять управление роботизированной системой; наконец, стабильная система электропитания является гарантией безопасной работы робота.
Контроллер робота — это основной компонент, используемый для управления и контроля поведения робота. Обычно это встроенная система, отвечающая за получение данных датчиков, выполнение алгоритмов управления, принятие решений о движениях робота и связь с внешней средой или оператором. Между тем, основная роль контроллера робота заключается в выполнении вычислений и управлении многоосными движениями, поэтому основной контроллер контроллера робота должен иметь высокопроизводительный процессор, встроенную операционную систему реального времени, поддержка промышленной шины EtherCAT и богатый набор функциональных интерфейсов.
Forlinx Embedded рекомендует использовать SoM промышленного класса FET3568J-C в качестве основной платформы управления для контроллера робота. SoM FET3568J-C спроектирован и разработан на основе процессора промышленного класса Rockchip RK3568J. Четырехъядерная 64-битная архитектура Cortex-A55 имеет высокую частоту до 1,8 ГГц, обеспечивая мощную поддержку производительности. Он также оснащен встроенным NPU с вычислительной мощностью 1TOPS, способным удовлетворить требования к легким периферийным вычислениям с использованием искусственного интеллекта. Кроме того, он поддерживает патч Preempt rt87 в реальном времени, сокращающий задержку до 10–50 мкс, что удовлетворяет требованиям реального времени для различных приложений в промышленной сфере.
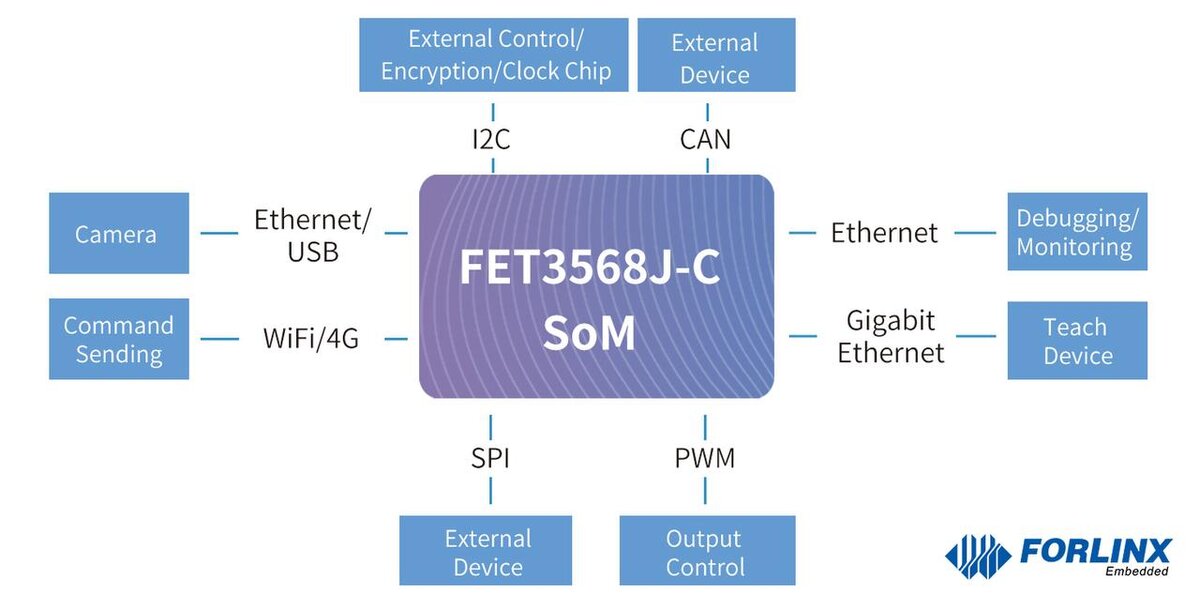
Компьютер FET3568J-C на модуле поддерживает двухканальную гигабитную сеть. Клиенты могут выбирать и портировать EtherCAT в соответствии со своими потребностями. Если им нужно более 2 полос, это можно реализовать за счет расширения USB; он оснащен 3-полосным CAN, 2-полосным CAN2.0, 10-полосным UART, 4-полосным SPI, 16-полосным ШИМ, 5-полосным IIC, USB3.0,4G/5G, Wi-Fi, LVDS и HDMI, и т. д. Богатые высокоскоростные интерфейсы делают расширение функций и подключение более эффективными и простыми.
Первоначально опубликовано на www.forlinx.net.



















