В статье рассказано о микросхеме К1382НМ025 для реализации угломерного датчика (энкодера) непосредственно на валу устройства и ее функциональных возможностях. Показаны преимущества, в том числе перед импортными аналогами.
В большинстве случаев для измерения угловых перемещений используются функционально готовые к применению устройства – энкодеры. Они представляют собой угломерные датчики, использующие технологии оптического, магнитного, резистивного или даже контактного преобразования угла положения вала в электрический сигнал.
Зачастую применение отдельного дополнительного устройства (энкодера) усложняет конструкцию изделия и влечет за собой необходимость механической калибровки угловых положений двух валов, их соосности и исключения люфта муфты при их вращении. В статье пойдет речь о функциональных возможностях микросхемы К1382НМ025 для реализации угломерного датчика непосредственно на валу устройства.
Описание и принцип работы
Микросхема состоит из встроенного магниточувствительного сенсора, аналогового тракта усиления сигнала сенсора и тракта цифрового преобразования сигнала в код. Источником угловой информации является магнитное поле, создаваемое радиально намагниченным цилиндрическим магнитом, закрепленным на торце вала (рис. 1б). Таким образом, направление магнитного поля будет соответствовать угловому положению вала. Для считывания направления магнитного поля сенсорная система содержит несколько пар датчиков, использующих эффект Холла и расположенных по окружности диаметром 2,2 мм (рис. 1б). Габариты микросхемы составляют 6 × 6 мм (рис. 1а).
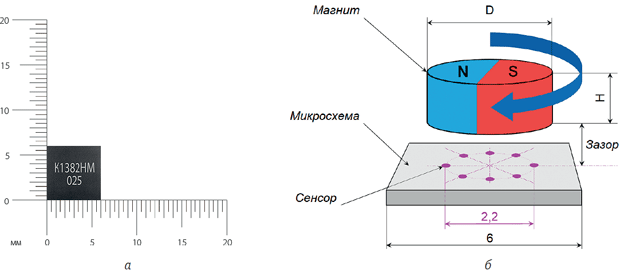
Рис. 1. Микросхема К1382НМ025: а – внешний вид при исполнении в пластмассовом корпусе PQFN‑6x6-40; б – магнитная система
В отличие от импортных аналогов в микросхеме предусмотрено четыре пары датчиков вместо двух, что позволяет получить более линейную характеристику преобразования во всем диапазоне угловых положений (360°).
Датчики формируют входные сигналы для синусного и косинусного каналов аналогового тракта микросхемы. Сенсор и магнит образуют сенсорную систему, от качества работы которой зависит точность считывания угла. Для обеспечения качества необходимо совместить ось поворота магнита с центром сенсорной системы – центром корпуса микросхемы. Для этого в микросхеме предусмотрен канал калибровки. Рекомендуемые размеры диаметрально намагниченного цилиндрического магнита: не менее D = 6 мм, Н = 3 мм.
Электрическая компенсация постоянной составляющей магнитного поля методом подстройки смещения нуля дифференциальных усилителей синусного и косинусного каналов допускает конструктивную несоосность в пределах ±0,25 мм. Недостаточность или избыточность уровня сигнала сенсора компенсируется усилением дифференциальных усилителей. Оптимальное расстояние между корпусом микросхемы и магнитом находится в пределах 0,5–1,5 мм. При увеличении расстояния повышается степень влияния магнитных помех и соотношение сигнал/шум, определяющее точность считывания угла положения. Наличие зазора позволяет расположить в нем перегородку из немагнитного материала и разместить плату с микросхемой в изолированном от механической части объеме.
С помощью следящего АЦП в тракте цифрового преобразования осуществляется преобразование синусно‑косинусных сигналов в 12‑битный код угла, пропорциональный разности текущих значений их амплитуд. Далее из этого кода формируются сигналы интерфейсов:
- линейный выход (формируется 12‑разрядным ЦАП);
- цифровой последовательный интерфейс SPI/SSI;
- инкрементальный квадратурный интерфейс;
- трехфазный UVW для управления вентильными электродвигателями;
- ШИМ‑сигнал.
Основные электрические параметры микросхемы:
- диапазон измеряемых углов: от 0 до 360°;
- программируемый счетчик оборотов: 10-разрядный (до 1024 об.);
- максимальная скорость вращения1: до 60 тыс. об./мин;
- разрядность вычисления кода: 12 бит (4096 отчетов на оборот);
- угловое разрешение: 0,09° (5,3 угл. мин);
- время преобразования: 250 нс;
- погрешность преобразования: ±0,35°;
- напряжение электропитания2: +5 В ± 10 %;
- ток потребления: 30 мА;
- диапазон рабочих температур: от –60 до +125 °C.
Настройка микросхемы
Настройка микросхемы выполняется после совмещения магнитной системы методом записи параметров преобразования в соответствующие регистры энергонезависимой памяти (EEPROM) микросхемы через цифровой последовательный интерфейс (SPI). Для этого может быть использован конвертер интерфейсов USB/SPI с программным обеспечением производства АО «ЗНТЦ» или аналогичные аппаратно-программные средства, выбранные на основании документации на микросхему.
Функциональные возможности микросхемы
Широкий набор функциональных возможностей микросхемы и гибкость их настроек в сочетании с малыми габаритами и размещением сенсорной системы на кристалле позволяют отечественной разработке достойно конкурировать с импортными аналогами.
- Микросхема выдает код углового положения сразу после подачи напряжения питания, калибровка начального положения магнита не требуется.
- Точность преобразования зависит от диаметра сенсорной системы. Размеры встроенной сенсорной системы ограничены размером корпуса. Для реализации максимальной точности преобразования предусмотрена возможность подключения внешнего синусно‑косинусного сенсора.
- Любое угловое положение магнита может быть задано как нулевое записью кода смещения в энергонезависимую память микросхемы или задаваться фронтом внешнего импульса после подачи напряжения питания.
- Изменение направления отсчета угла (направления вращения) задается соответствующим регистром.
- Предусмотрена возможность ограничения значений для кодов верхнего и нижнего углового положения.
- С микросхемой интегрирован встроенный датчик температуры для внешней компенсации температурной зависимости сенсора. Код температуры может быть считан через интерфейс SPI/SSI.
- Многооборотный режим работы обеспечивает циклический реверсивный счетчик числа оборотов с программируемым направлением и модулем счета (до 1024 оборотов). Многооборотный код (22 бит) может быть считан через интерфейс SPI.
- При изменении угла положения вала микросхема может выдавать логический сигнал для считывания нового значения угла положения внешним контроллером. Чувствительность задается настройкой гистерезиса на обратное вращение.
- Микросхема может работать в качестве компаратора угла поворота и выдавать логический сигнал о превышении/уменьшении значения углового кода заданного значения.
- Микросхема может работать в режиме пониженного энергопотребления.
- Предусмотрено формирование логических сигналов недостаточности и избыточности уровня магнитного поля. Эти сигналы используются для диагностики исправности магнитной системы в особо важных узлах.
- Максимальная скорость считывания вращения магнита при использовании последовательного интерфейса SPI ограничивается его быстродействием и длиной выходного кода выбранного режима работы.
- При использовании последовательного интерфейса SSI в выходном 16‑битном коде передается только однооборотная угловая информация (до 2775 об./мин).
Микросхема К1382НМ025 применяется: в авиационной промышленности; в датчиках положения в системах управления; в промышленных энкодерах положения (рис. 2).
Рис. 2. Области применения микросхемы К1382НМ025
К конкурентным преимуществам К1382НМ025 можно отнести: однокристальное размещение (сенсора и схемы обработки); электрическую калибровку для упрощения центровки магнита; наличие встроенного программируемого компаратора углового положения; возможность программной привязки нулевого углового положения; широкий набор выходных интерфейсов.
Отладочный комплект
АО «ЗНТЦ» предлагает заказчикам и всем заинтересованным лицам отладочный комплект, который позволяет ознакомиться с технологией настройки параметров аналогового тракта микросхемы под магнитную систему, установленную на плате, а также запрограммировать режимы работы выходных интерфейсов под конкретные требования.
В состав отладочного комплекта входит отладочная плата с установленной микросхемой К1382НМ025 и магнитной системой (рис. 3а), а также уже упомянутый конвертер интерфейсов (рис. 3б) с прикладным программным обеспечением. Все выводы микросхемы выведены на контакты, расположенные по периметру платы, для подключения контрольно‑измерительной аппаратуры. Конвертер и программное обеспечение могут быть использованы и при настройке микросхем в составе серийных изделий.
Рис. 3. Отладочный комплект микросхемы К1382НМ025: а – демонстрационная плата 72 × 80 мм; б – программатор Б‑01 (конвертер интерфейсов USB/SPI)
Более подробная информация о микросхеме К1382НМ025 доступна на сайте компании «Зеленоградский нанотехнологический центр» (АО «ЗНТЦ»).
______________________________
1 Максимальная скорость вращения может быть ограничена быстродействием используемого выходного интерфейса.
2 Возможно использование напряжения питания +3,3 В.
Статья опубликована в журнале «ИСУП»
Статья на сайте журнала >>



















