Студенты Университета Монаша опубликовали проект относительно недорогого робота Dingo, вдохновленного робособакой Spot от Boston Dynamics. Модульная конструкция разработана с расчетом на простоту модификации, корпус изготовлен на 3D-принтере, а за управление отвечает микрокомпьютер Raspberry Pi 4 Model B.

Авторы этой разработки — Александр Калверт и Нейтан Фергюсон, студенты инженерного факультета Университета Монаша. За основу ребята взяли опенсорсную платформу Stanford Pupper, созданную инженером-робототехником Стэнфордского университета Нейтаном Кау с той же целью — для использования в образовательных и исследовательских проектах.
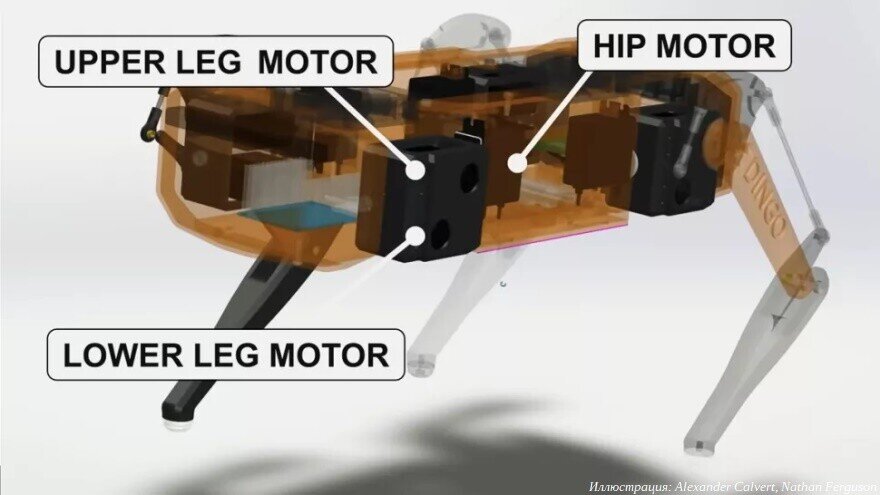
Главное преимущество таких систем — высокая мобильность и проходимость: четырехногие роботы справляются с довольно сложными рельефами и даже способны карабкаться по лестницам. Каждая из четырех ног оснащена тремя сервомоторами с крутящим моментом 35 кгс·см под управлением Raspberry Pi 4 B. Заряда литий-полимерных аккумуляторов хватает примерно на двадцать пять минут непрерывной работы.
Робособака весит около трех килограмм и достигает двадцати пяти сантиметров в высоту. Бегает робот довольно резво, развивая скорости до тридцати сантиметров в секунду. Система способна работать в режиме ручной навигации с помощью геймпада от PlayStation или ввода команд через клавиатуру, либо в автономном режиме. Дополнительно робот оснащен платой Arduino Nano, отвечающей за периферийные устройства, например аналоговые датчики. Масса полезной нагрузки достигает 500 г.
Сборка робота обошлась примерно в полторы тысячи долларов, треть этой суммы приходится на сервомоторы. Для сравнения, робособаки Spot предлагаются по цене от семидесяти пяти тысяч долларов, хотя, конечно, это куда более продвинутые системы.
Документация по проекту Dingo доступна в репозитории GitHub, CAD-файлы можно найти на сайте GrabCAD.
А у вас есть интересные новости? Поделитесь с нами своими разработками, и мы расскажем о них всему миру! Ждем ваши идеи по адресу news@3Dtoday.ru



















