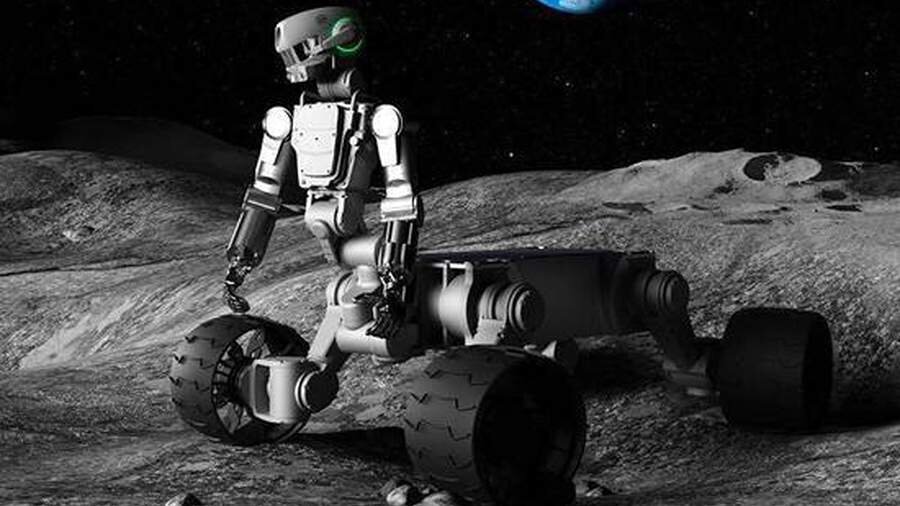
Специалисты НПО «Андроидная техника» и фонда Alpha Robotics Venture ведут разработку робота, основная задача которого построить базу на Луне перед тем, как на нее отправятся люди. Данный робот представляет из себя колесную базу, на которой установлен антропоморфный торс человека, а также БПЛА.
Каждая из этих составляющих будет иметь отдельную систему управления, что позволит продолжать определенные работы даже в случае выхода отдельных частей комплекса.
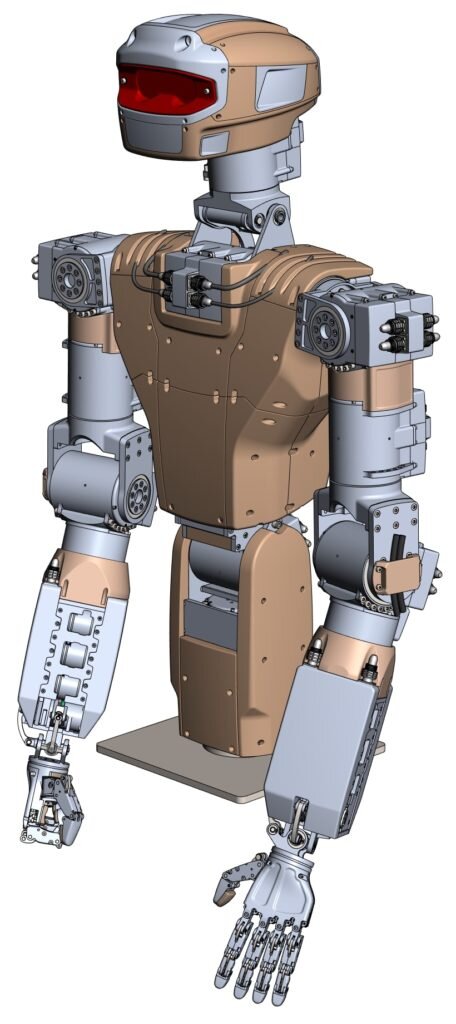
«Торсовая часть будущего робота уже готова. Мобильная платформа сейчас строится. На ней проводятся отладки и доработки, чтобы можно было проводить различные тесты. Через несколько месяцев должны начаться испытания», — сообщил глава компании Alpha Robotics Venture Владимир Белый.
В создании робота-кентавра очевидно пригодился опыт НПО «Андроидная техника», которая ранее создала робота Федора и прототип робота Теледроид. Обе эти разработки уже побывали на МКС, где проходили испытания.
Однако условия космической станции отличается от условий, которые ждут робота на поверхности Луны. Во-первых, на спутнике Земли присутствует гравитация — чтобы приспособится к ней конструкцию дополнительно усилят.
Так же лунная поверхность «славится» своим реголитом -мельчайшими частицами пыли, которые могут проникать в мельчайшие отверстия и нарушать работу систем. Для решения этой проблемы торс робота планирует облачить в специальный скафандр.
Колесная база будет иметь 4 колеса, выполненных из специального титанового сплава. Каждое из колес оснащается собственным приводом и отдельной осю вращения. Для большей надежности для этих колес разрабатывают специальные сверхпрочные подшипники.
Формфактор самого робота — антропоморфный торс, выбран не случайно. Дело в том, что управление роботом будет осуществляться оператором с помощью очков виртуальной реальности и специального экзоскелета. Данная связка позволит оператору наблюдать окружающее пространство глазами робота и заставлять его повторять свои движения. Причем система будет работать и в обратную сторону, за счет датчиков человек будет ощущать размеры и вес предметов, с которыми взаимодействует робот.
Питание робота планирует обеспечить либо за счет солнечных панелей, либо за счет небольших атомных батарей, основным топливным элементом которых будет никель-63.
Похожими разработками так же занимаются в Японии. Их прототип лунного робота GITAI R1 успешно прошел испытания, так что можно с уверенностью сказать, что данная концепция имеет право на существование.