Всем привет!
Пришла у меня мысль посвятить несколько статей моей разработке для обучения робототехнике - двухколесной тележке на базе Ардуино.
Такие наборы активно продаются как у китайцев, так и на отечественных маркетплейсах. Цены на такие тележки вполне себе реальные, я даже не ожидал, что это так дорого. Ну вот например такие объявления.
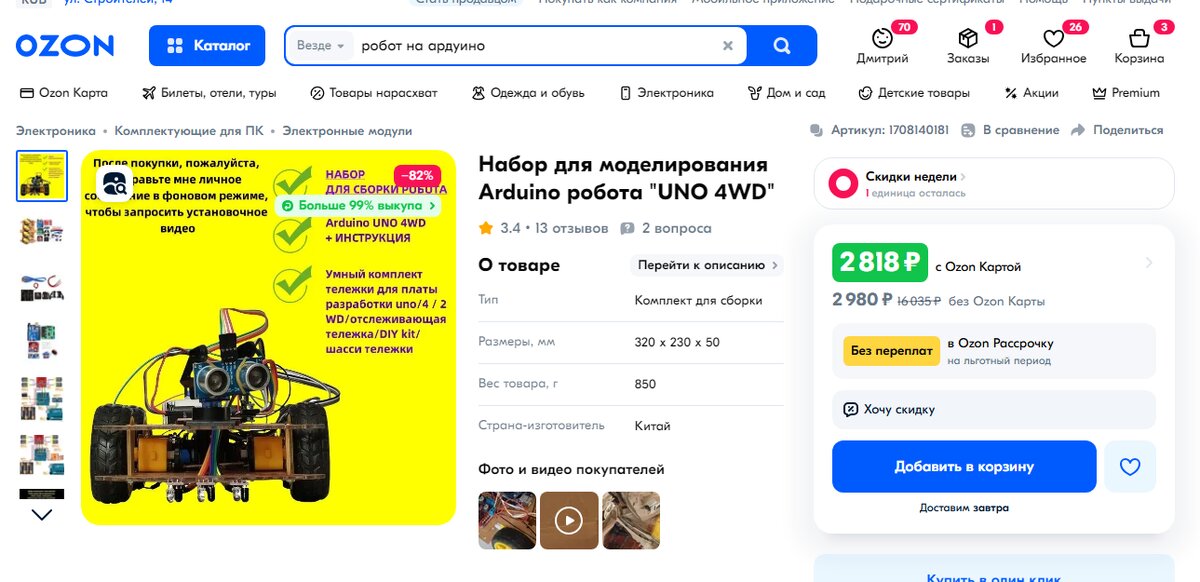
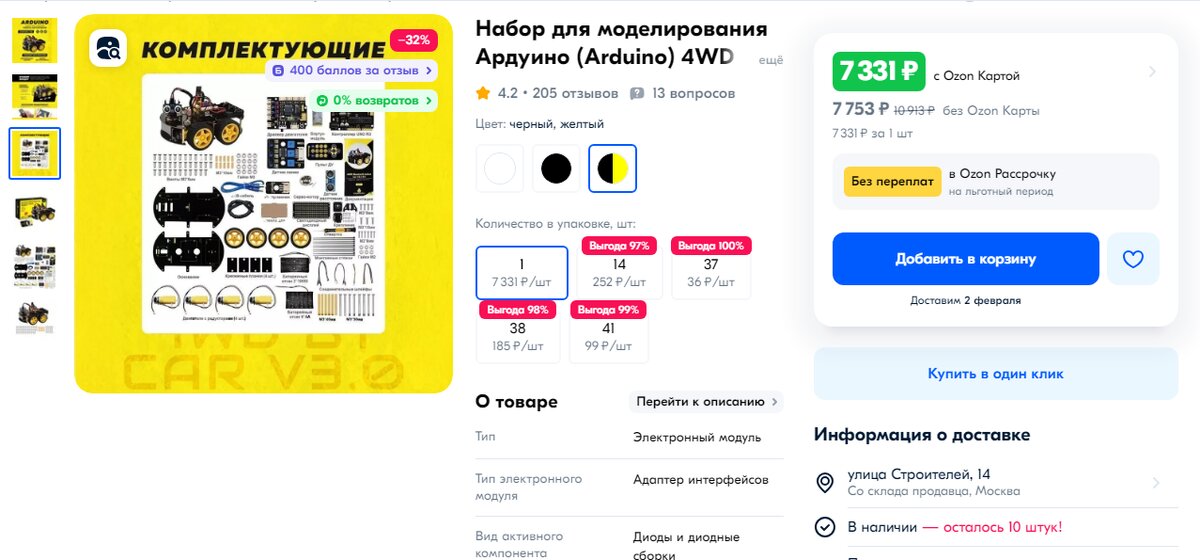
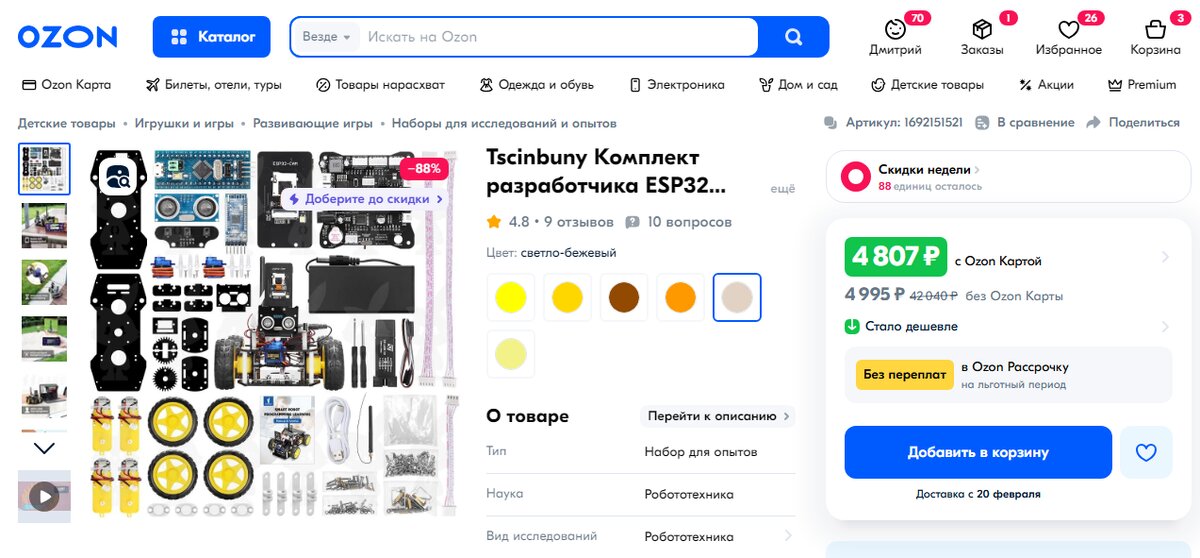
Комплектация примерно одинаковая. У одного есть ESP32 cam, у кого-то просто Ардуино, плюс несколько простых приборов, например УЗИ датчик и серва. К некоторым даже нет инструкции, не представляю как их вообще собирать если вы вообще не в зуб ногой.
Самый дешевый вариант это полный привод с датчиком УЗИ и датчиком линии на три. Хотя не понятно зачем там полный привод, если хотите ехать по линии. Полный привод хорош когда есть дистанционное управление, а в остальных случаях он нафиг не нужен.
Сколько будет стоить собрать самому такую штуку? Тут конечно посчитать можно исключительно комплектующие. А ведь помимо комплектующих нам необходима сама платформа которая может все это объединить и некий интеллектуальный труд по разработке модели.
Можно выполнить основу на фанерке, тут никто не мешает это сделать. Крепеж тут в основном мизерный, десяток винтиков и гаечек.
Давайте прикинем сколько стоят сейчас комплектующие на такую машину.
Пройдемся по дну рынка, покупать все будем на Али. (ПОтом заметил, что некоторые комплектующие есть дешевле в отечественных магазинах)
Плата Ардуино УНО - 331 руб.
Плата расширения для подключения датчиков и прочего Сенсор ШИЛД - 144 рубля
Берем самые дешевые желтые мотор-редукторы в количестве 4 штук вместе с колесами - 966 рублей. НО! Если взять те же моторы вместе с платформой и батарейным блоком, выходит 1344 рубля. Уже будет готовое изделие, что намного лучше чем пилить фанерку. Нашел на Озоне даже за 844 рубля такую же вещь, так что надо поискать где дешевле.
Далее нам нужны датчики и сервопривод SG90. Первым запишем УЗИ датчик HC-R04. Его цена - 91 рубль.
Далее идет серво привод SG90 синий, самый дешевый - 117 рублей.
Теперь переходим к датчику линии. Тут конечно большие вопросы по поводу этого датчика, что идет в наборе. Датчик датчику рознь, это пришло с опытом. Не факт, что этот датчик вас полностью устроит, но он есть в продаже и стоит буквально 170 рублей.
В принципе это всё, что идет в наборе. Получилось 2197 рублей.
Помимо этого вам потребуются провода для подключение всех компонентов, но это уже копейки. Вот такие пироги. Далее вам понадобиться все это правильно соединить и понять, зачем вы вообще это собирали)
Если вы не новичок в этом деле, то скорей всего вы так делать не будете. Компоненты вы будете выбирать более тщательно, а некоторые вообще можно исключить. По моему опыту, если вы собираете робота по линии, то вам не нужен полный привод, а нужны качественные аналоговые датчики линии. А еще лучше будет, если вы изготовите их самостоятельно.
Плату можно взять Нано и изготовить на её основе плату для подключения всего остального, как сделал я.
Первый набор для обучения я описывал очень давно, аж в 22 году. С этого момента машина полностью изменилась, да и функционал я несколько изменил.
Вот недавно выходила статья где представлен был новый набор для обучения.
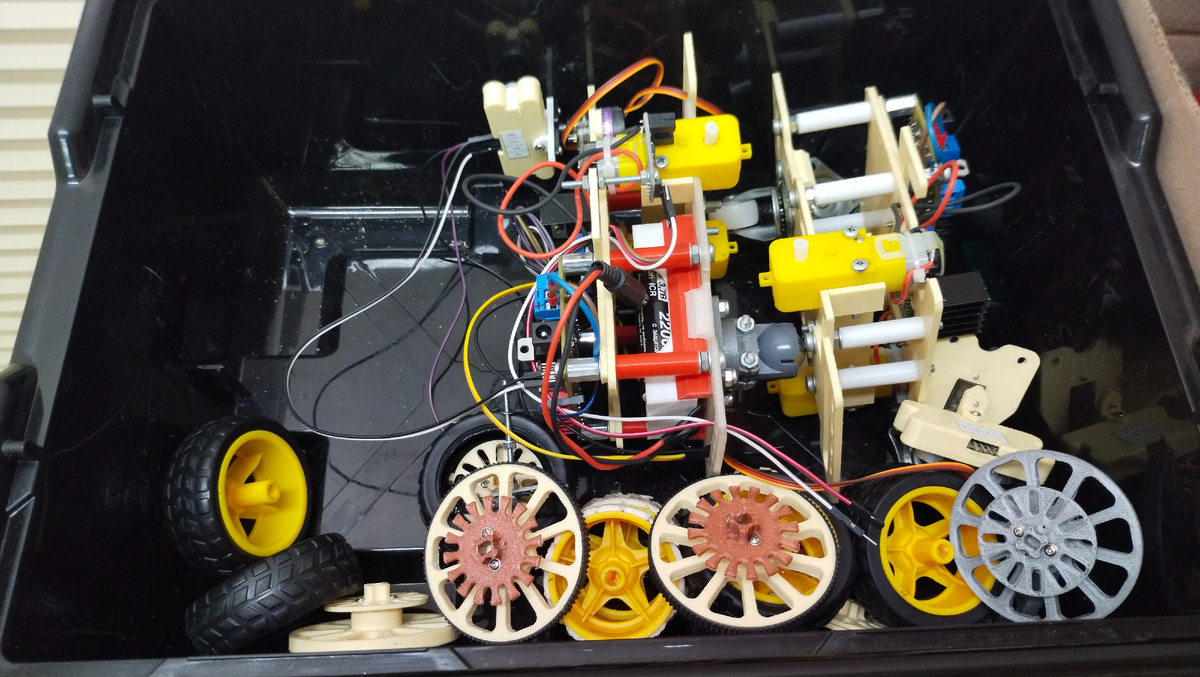
С этого момента я долго подбирал разные комплектующие. Оказалось, что это не так-то просто сделать простую колесную тележку с нормальным расположением центра тяжести и вменяемой компоновкой. На данный момент я перебираю варианты мотор-редукторов и колес.
На данный момент я рекомендую брать медленные мотор редукторы с металлическими шестернями. Для правильной работы нужен минимальный люфт выходного вала, а к колесам главная претензия это не скользить на любой поверхности. Сейчас у меня стоят синие мотор-редукторы с понижением 1 к 90. Стоят примерно 200 рублей штука.
Узкие колеса с этой точки зрения показали себя плохо. Они проскальзывают при старте и при торможении мотором. Я сделал их под ремень от ЧПУ, шириной 6 мм. Этого оказалось мало для нормального сцепления с поверхностью. Сейчас буду пробовать покрышки для робота-пылесоса, посмотрим на их поведение.
Данные колеса совмещены с щелевым колесом для подсчета оборотов. Это необходимо для контроля точный поворотов машины. Диаметр колеса 69 мм.
Оригинальные покрышки от мотор-редуктора вообще никуда не годны. Разве что в полноприводную модель на РУ. Но следует помнить, что покрышки под усилием начинаю прокручивать на диске. Тут либо клеить, либо что-то подкладывать на диск.
Долго ищу материал из которого можно изготовить покрышку самостоятельно, даже сделал диск под это дело. Но пока не придумал чем его можно обернуть. Вроде как есть для роботов-пылесосов лента-накладка на колесо, даже видел где-то в продаже, но не знаю какой она длинны.
Драйера на моторы тоже можно попробовать разные. В наборах постоянно тычут в драйвер L298N. Он уже довольно старый, сейчас есть куча вариантов для замены, под разные токи и напряжения.
Питание от батареек - сразу НЕТ! Никаких батареек, только АКБ. Для нормальной работы робота порой требуются весьма не малые токи. Батарейки скорей всего придется часто менять, либо программа будет периодически подвисать.
Довольно большой проблемой оказалось подобрать третье колесо. Были перепробованы различные колеса от мебели, с разными роликами. Вывод, они не особо подходят для этих целей. Так как масса модели не велика, подшипники в этих колесах плохо отрабатывают резкие повороты. Плюсом в них идет некая смазка, которая еще больше замедляет поворот. Смазку я вымывал сразу и некоторые ролики начинали худо-бедно вращаться. По мне лучший вариант это Lego ролик из набора minstorms. Там стоит металлический шарик с пластиковой обойме. Может двигаться в любую сторону при любом расположении робота. Нашел на Али аналоги. Отличие в том что ширик может выпадать из-за хренового зазора в обойме. А так вполне сойдет.
Короче говоря, очень много вопросов к варианту с готовым роботом. Но спрос есть, поэтому нельзя сбрасывать со счетов данный вариант. Не можешь придумать сам, можно купить. Главное было понимание что к чему, а не то покупка станет разочарованием. Как для вас, так и для ребенка.
На этом не прощаюсь!
Продолжение следует....