Настройка сервоприводов является важным навыком при сборке FPV дронов, и понимание этого процесса может существенно повлиять на работу изделия. Ранее мы уже неоднократно рассказывали о методах подключения, используя функции SERVO_TILT и CHANNEL_FORWARDING. Особенностью первой является возможность подключения до 2х сервоприводов. Вторая функция позволяет подключить гораздо больше устройств, количество которых определят характеристики нашего полетного контроллера.
Сегодня мы рассмотрим одновременное подключение сразу четырех сервоприводов на полетный контролер SpeedyBee F405 v3.
Подключение сервоприводов к FPV дрону
Чтобы управлять сервоприводом применяется кодирование длиной импульса. Принцип работы заключается в изменении длительности импульсов сигнала при постоянной частоте. Для успешной реализации задумки для начала требуется рассмотреть характеристики полетного контроллера и уточнить сколько выходов PWM поддерживается.
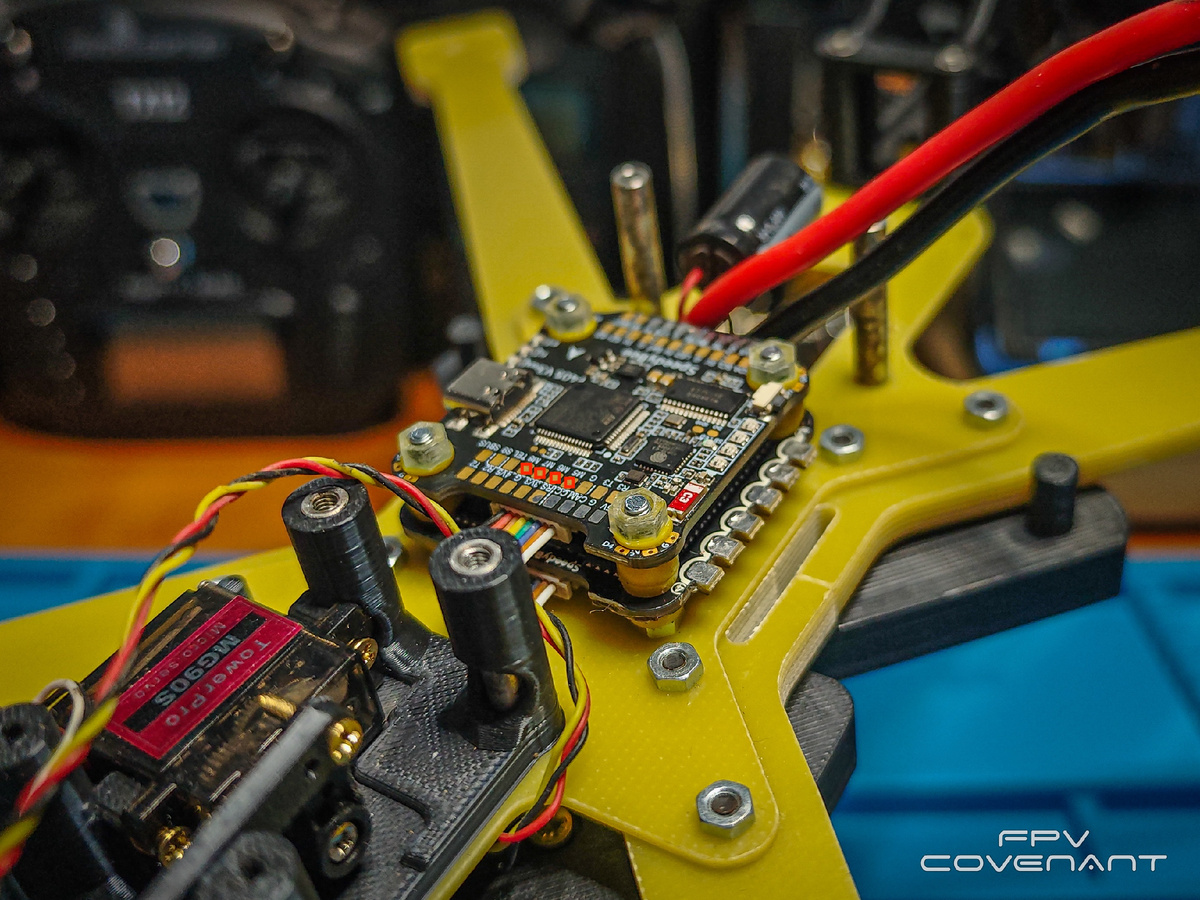
В нашем случае полетный контролер SpeedyBee F405 v3 поддерживает 9 PWM выходов. Это контакты M1-M8 и контакт LED.
Так как контакты M1-M4 используются для работы моторов, мы будем использовать для управления сервоприводами контакты M6-M8.
Хочется напомнить, для изменения положения подвижных частей в FPV дроне используется сервопривод, от которого отходит три провода: красный, желтый и коричневый.
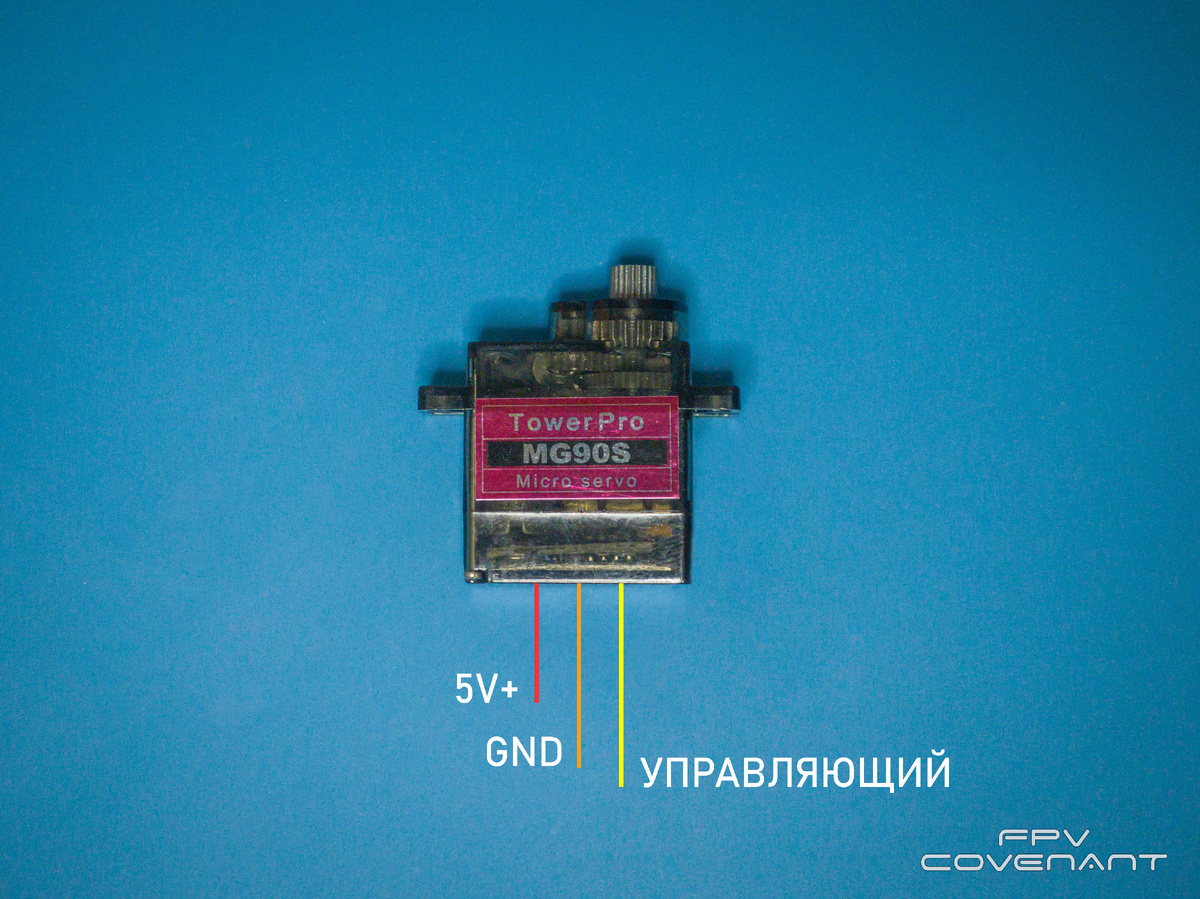
красный провод - плюс питания;
коричневый - минус питания;
жёлтый - управляющий сигнал.
Мы собрали макет на который установили для наглядности сервоприводы.
Соответсвенно минус для всех приводов будет общий: коричневые провода можно скрутить вместе и припаять на любой контакт GND полетного контроллера. Аналогично сделаем с красным проводом и припаяем его на контакт 5V. Желтые управляющие провода припаиваем на контакты M6-M8.
Далее нам потребуется произвести соответствующие настройки в программе Betaflight Configurator.
Настройка сервоприводов в Betaflight Configurator: используем CHANNEL_FORWARDING
Включаем FPV дрон, запускаем приложение Betaflight Configurator и подключаемся к полетному контроллеру. Мы будем использовать функцию CHANNEL FORWARDING. Поэтому заходим во вкладку «Конфигурация» и включаем CHANNEL_FORWARDING.
После этого обязательно нажимаем на кнопку «Сохранить» в правом нижнем углу.
Далее определим на каком канале находится наши переключатели, которые мы будем использовать для управлением сервоприводов и настроим переброску каналов.
Переходим во вкладку приемник и дергаем кнопками, которыми будет управляться серва, выбирая канал.
Тут важно обратить внимание: мы определяем тумблер который будет отвечать за управление первым сервоприводом (в нашем случае используется AUX2), соответсвенно при работе функции CHANNEL_FORWARDING для управления следующими устройствами будут использоваться только AUX3-AUX5. Если вас не устраивают тумблеры работающие на этих каналах, их нужно будет перенастроить.
Считая столбцы начиная с нуля мы определеям что AUX2 соответствует канал 5. (Смотрим картинку выше).
Переходим в командную строку и вводим команду:
set channel_forwarding_start = 5
save
Далее вводим команду resource и нажмаем «enter». Наша задача посмотреть пины назначенные на моторы M5-M8 и переназначить их соответственно на сервоприводы 1-4.
Далее вводим команды:
resource MOTOR 5 none
resource SERVO 1 B00
Таким образом мы освобождаем пин на моторе и назначим его на сервопривод.
Так требуется сделать для всех моторов M5-M8
В завершении сохраняем все изменения вводом команды save.
После перезагрузки fpv дрона переходим еще раз в командную строку, вводим команду resource и проверяем правильно ли переназначились пины и появились ли в списке сервоприводы.
Все получилось отлично! Хочется отметить, что таким способом наш полетный контролер позволяет подключить еще и 5 сервопривод на контакт S9.
Настало время проверить как все работает! Перезагружаем дрон, подключаем аккумулятор и пульт. Переключая тумблеры мы видим как крутятся наши сервоприводы.
Благодаря функции CHANNEL FORWARDING мы научились пробрасывать каналы и управлять сервоприводом не задействуя вычислительные мощности контроллера. Таким способом мы можем подключить: управление поворотным кронштейном камеры, переключение с дневной камеры на ночную, и управление сбросом.