Средства обнаружения
С тягой более-менее разобрались, настало время переходить к разведывательным возможностям субмарины. Тут для Кригсмарине ситуация сложилась чуть менее печальная: критических провалов нет, но и гордиться тоже нечем. В целом, я бы сказал что с точки зрения способности обнаруживать цели в океане, тип XXI вообще ничем не отличался от лодок VII серии, хотя между этими двумя проектами было 10 лет разницы. Как же так случилось? Нууу… довольно банальным образом, в общем. Впрочем, вы сейчас сами всё увидите.
Радар
Начнём с самой главной инновации для морской войны за всю ВМВ - с радара. Тут у Кригсмарине всё было довольно печально - рабочие радарные установки у них появились достаточно рано, ещё в 1939-м, но вот характеристиками они не блистали. При дальности обнаружения всего в 7 км радарная установка получалась слишком громоздкой, что сильно демаскировало лодку при ходе в надводном положении. Попытки как-то ужать габариты радара успехом не увенчались, и флоту здесь пришлось обращаться за помощью к авиапромышленности. Как пишет Э. Рёсслер:
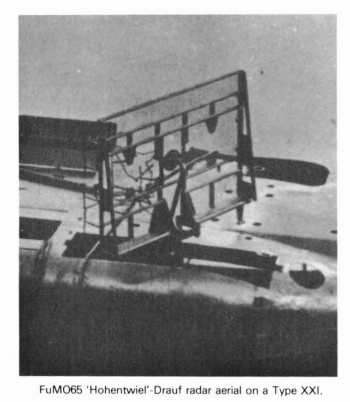
…Куда больше надежд возлагалось на авиационный радар Люфтваффе FuMG 200 «Hohentwiel», сконструированный Лоренцом летом 1942. Эта установка состояла из 24 диполей и занимала площадь 1.4 квадратных метра, рабочая частота была 556 МГц при длине волны 56 см. Морская версия этого радара носила название FuMO 61 «Hohentwiel U». К 20 сентября 1944 года 64 лодки уже были оснащены этим радаром, также планировалось установить его ещё на 32 субмарины типа VIIC и IX. 17 сентября 1944 U-862 отрапортовала из Пенага: «FuMO 61 «Hohentwiel» в походе отработал нормально. Дальность обнаружения грузовых судов составила 7.2 км. Тропический климат никакого влияния на работу радара не оказал.» И хотя затем ещё 16 лодок были оснащены радаром, такую практику можно назвать скорее исключением, нежели нормой. Поскольку подлодки теперь редко путешествовали в надводном положении, а их командиры боялись, что излучение радара выдаст местоположении субмарины силам ПЛО противника, реальная ценность этой инновации была сомнительной. Это же термин вполне применим и к дальнейшему развитию установки - FuMO 65 «Hohentwiel-Drauf», предназначенному для субмарин XXI серии. В конце войны были раз работы две отдельные радарные установки, пригодные для использования с перископной глубины: FuMO 84 «Berlin II» (длина волны 9 см), где выдвигающийся излучатель в корме был помещен в специальный корпус, устойчивый к давлению, и FuMO 391 «Lessing» (длина волны 2.4 м), где была просто выдвигаемая вверх антенна. Эти радары предполагалась начать ставить на подлодки с лета 1945-года.
Т.е. что мы имеем: самостоятельно немецкие морские инженеры в радар не смогли. Пришлось идти на поклон к Люфтваффе, и выпрашивать радар у них. Радар успешно выклянчили и даже начали ставить на подлодки, но практической ценности в таком шаге было немного - из перископного положения использовать установку было нельзя, а из надводного… ну, 7 километров дальности (3.7 мили) нам как бы намекают, что вахта из рубки с биноклями в руках по-прежнему вне конкуренции. По крайней мере, в дневное время. Ещё нужно отметить весьма посредственную подготовку немецких экипажей - в немецком подплаве вообще мало кто знал, что это такое ваш радар и зачем он нужен. Отсюда чисто суеверное к нему отношение, когда местные капитаны почему-то взяли себе в голову, что англичане будут обнаруживать подлодки в пассивном режиме, ориентируясь на излучение радаров. Впрочем, уровень компетенции личного состава на немецких подлодках является слишком большой и слишком болезненной темой, чтобы бы сейчас в неё углубляться.
Давайте вместо этого посмотрим на ситуацию с другой стороны: а насколько вообще немецкие радары были конкурентоспособны, по состоянию на 1945-й год? Тут мы упираемся в одну проблему чисто формального характера: у нас нет данных по эксплуатации FuMO 65. Вообще. Эти радары предназначались только для лодок XXI серии, и, по очевидным причинам, в боевых условиях протестированы не были. Выводы о параметрах установки можно сделать лишь косвенные, основываясь на двух фактах:
1) В американском отчёте отмечается, что радарная установка конструктивно идентична той, что устанавливалась на лодках IX серии. Отличия были крайне незначительными и заключались они, по большей части, лишь в особенностях монтажа.
2) В доступных нам немецких данных нигде не упоминается, что по дальности обнаружения FuMO 65 должен был превосходить FuMO 61. Судя по всему, 65-я серия являлась той же самой 61-й, только адаптированной для XXI проекта и оснащённой новым индикатором.
В общем, нет оснований полагать, что дальность обнаружения у FuMO 65 как-то отличалась от FuMO 61. Зная дальность FuMO 61 в 3.7 мили, можно провести сравнение. Для этого я процитирую один отрывок из статьи Роберта Динеша: «Radar and the American Submarine War, 1941 -1945: A Reinterpretation»:
…10-сантиметровый радар типа SJ изначально оснащался индикаторами типа «А» для измерения дистанции. Позднее также были добавлены индикаторы планируемой позиции, по которым командующий офицер мог оценивать тактическую ситуацию. Радар SJ так или иначе применялся на всех 4 стадиях проведения торпедной атаки: обнаружение цели, выход на позицию, проведение атаки, уход с позиции. На первой стадии субмарина была в большей степени озабочена поиском самой цели. В идеальных условиях радар SJ мог обнаружить одиночный торговый корабль на дистанции примерно 17 000 ярдов, а линкор на дистанции 10 500 ярдов (это зависело от погодных условий и размеров цели). Так, крупный конвой из торговых судов можно было обнаружить на расстоянии 19 000 ярдов, а линкор, идущий в составе оперативного соединения - на 25 000 ярдов.
Хм, неплохо так. Целых 8 миль для одиночного транспорта, 9 миль для конвоя, и 12 миль для оперативного соединения. По сути, мы имеем 2-х кратное увеличение параметров, относительно немецкого образца. А как этот чудо-радар назывался?
«SJ» вроде? Хм, что-то знакомое. Где-то я уже видел эту аббревиатуру… А, вспомнил! Точно также называлась установка, применяемая на американских подлодках типа «Гато»… ещё в 1942-м году. Т.е. у нас есть немецкий радар 1945-го года, который по дальности обнаружения вдвое уступал американскому радару 1942-го года (собственно, в процитированном выше отрывке речь идёт именно что о раннем типе SJ). Более того, американский радар можно было использовать с перископной глубины (на самом деле не совсем с перископной, там чуть выше нужно было подняться). Это несколько ухудшало его параметры, так что такой метод популярностью не пользовался. Но технические это можно было сделать. У Кригсмарине же в этом направлении всё было просто ужасно. Только к лету 1945-го немцы планировали, внимание, начать тестировать новые радары, пригодные к работе с перископной глубины. Вообще, вся эта история с FuMO 65 и SJ очень хорошо иллюстрирует реальный уровень технологических возможностей Рейха: и в Германии и в Штатах параллельно внедряли радары на подлодках; но как-то так обстоятельства сложились, что американские радары обладали вдвое большей дальностью обнаружения, появились раньше, и распространены были гораздо шире.
Сонар
С сонаром всё оказалось довольно проще - в ходе ВМВ немцы его тупо не использовали на своих массовых подлодках (хотя готовая установка у них имелась), и лишь на XXI серии они изменили своим традициям, и таки воткнули сонар в верхнюю часть рубки. Но откуда такие внезапные перемены настроения? Всё дело в том, что активный сонар на подлодке, в целом, не особо нужен. У сонара есть две задачи, для которых он может быть актуален: это поиск цели, и выработка данных для огневого решения при стрельбе торпедами. С точки зрения поиска цели сонар наголову уступает радару - как читатель знает из предыдущей части, даже на надводных кораблях, где эта тема была куда как более актуальна, сонар мог обнаруживать цели в лучшем случае на расстоянии примерно 1.5-2 мили. Для сравнения, в идеальную погоду, через перископ, подлодка могла находить корабли на дистанции в 5 миль. Т.е. в сценарии, когда субмарина уже находится под водой, сонар не даёт никакого преимущества по сравнению с обычным перископом. Другое дело, что перископ визуально заметен, в отличие от эхо-импульсов сонара. Так может быть, сонар будет более ценен в ситуации, когда нужно любой ценой сохранить скрытность? Едва-ли. Дело в том, что вот эхо-импульсы сонара прекрасно улавливаются любым кораблём, на котором стоит подходящая гидроакустическая станция. Грубо говоря, когда если подлодка к конвою на расстояние в 1.5 мили и включает сонар, то эсминцы охранения сначала получают общее предупреждение, что что-то здесь не так, а потом, спустя какое-то время, они получают ещё и конкретный пеленг. С понятными для субмарины последствиями. В общем, в подводном положении сонар не имеет преимуществ перед перископом, а в надводном - перед радаром. Однако, сонар можно ограниченно использовать для выработки огневого решения. Вся фишка сонара здесь заключается в том простом факте, что с его помощью можно довольно точно определить расстояние до цели (важная оговорка - если эта цель находится близко к поверхности). Чего, например, нельзя сделать с помощью гидрофона и не всегда можно сделать с помощью перископа. Здесь большую играет свою роль фактор скрытности - если эсминцы услышат эхо-волны с сонара подлодки, то конвой поменяет курс, и полученные данные для огневого решения окажутся бесполезными. В целом, я бы сказал что главную роль здесь будет играть именно скорость, с которой лодка будет делать все нужные расчёты - если дать буквально 1-2 импульса тут же отключить сонар, то эсминцы может быть ничего и не заметят. Впрочем, такая постановка вопроса в значительной степени теряет актуальность, если у вас есть радар, пригодный к использованию с перископной глубины. Поскольку для выработки огневого решения обязательно нужен перископ, то можно сознательно пойти на некоторую потерю скрытности, связанную с торчащей из воды антенной радара (и так перископ уже торчит, хуже уже не будет). В таком сценарии смысла в сонаре, опять же, нет никакого - расстояние до цели можно вполне точно измерить и радаром. При этом с точки зрения демаскировки радар даже предпочтительней будет - ведь не на каждом эсминце стоит детектор радарного обнаружения. В целом, сонар на подлодках - это такой ситуативный инструмент, который иногда бывает нужен, но чаще всего он стоит без дела. Применительно же к XXI серии в сонаре было чуть больше смысла - ведь немцы в нормальные радары так и не смогли.
В ходе войны Кригсмарине тестировало разные типы сонаров, экспериментируя с их расположением на субмарине, электронной начинкой, и т.д. Конкретно для XXI проекта они разработали отдельный тип сонара, т.н. «SU Apparatus Nibelung». У этой установки тоже было несколько вариантов исполнения, и, предположительно, последний испытанный образец и пошёл в серию. Так, Эберхард Рёсслер в другой своей книге, «The Type XXI U-boat-Anatomy of the ship», говорит по этому поводу следующее:
… 9 и 10 января 1945 года, к северу от полуострова Хель, проводились испытания сонара на U-3504 с целью определения уровня помех и дальности обнаружения. По уровню помех результаты были оптимистичные, по сравнению с предыдущими испытаниями. Однако дальность обнаружения была признана неудовлетворительной. Условия среды не благоприятствовали эхо-локации (сильные переотражения сигналов на дальности 1000-1500 м), и сонар SU смог обнаружить судно «Донау» не дальше чем на дистанции в 3000 м. При использовании гидрофона GHG дальность обнаружения составила 4000 м. Точность определения пеленга на GHG была на 1 градус больше, чем на SU - сонар был сделан таким образом, что его надо было вращать вручную, и в процессе происходило соскальзывание, приводившее к погрешности примерно в 3 градуса.
…К концу войны было произведено 80 комплектов сонара SU для лодок XXI проекта. Нельзя с уверенность сказать, что все эти сонары были реально установлены на подлодках, однако, не приходится сомневаться, что в дальнейшем такое решение планировалось, и в итоге все лодки XXI серии должны были быть сонаром SU.
Здесь у нас возникает первая проблема: сонаров всего было произведено 80 единиц. Лодок XXI проекта, в боеготовом состоянии, было произведено 115 единиц. Т.е. лодок было больше, чем сонаров. Нужно сделать оговорку, что боеготовыми лодки XXI можно назвать лишь в кавычках: если проектной документацией предусматривалась установка сонара, и по факту этот сонар ещё даже на заводе не изготовлен, то такая лодка никак не может считаться пригодной для эксплуатации. Тут мы имеем дело с типичным бардаком внутри Кригсмарине, так что особо внимание на этом вопросе я заострять не буду: да, немцы вводили в строй не боеготовые лодки. Но по сравнению с ранее описанными проблемами XXI серии, отсутствие сонара выгладят как незначительное неудобство.
Вторая проблема относится к методу монтажа сонара в корпус субмарины (в рубку, если быть точным). Видите ли, немцы испытывали гидроакустику XXI проекта ещё в 1944-м году. В процессе они вышли на приемлемый показатель дальности (в районе 8000м), но возникла одна проблема - уровень помех был такой, что пользоваться гидроакустикой на движущейся субмарине по факту было невозможно, сказывалось отвратительное качество изготовления корпуса. Для решения этой проблемы они достали сварочный аппарат, и начали измываться над U-3504. В результате удалось кое-как решить проблему с помехами, но при этом почему-то просела дальность обнаружения. Как так случилось? А чёрт его знает. То ли криво корпус залатали, то ли само инженерное решение было не лучшим образом продумано, но по факту немцы просто развернули проблему 180 градусов, никак при этом её не решив: в варианте без «сварочного аппарата и такой-то матери» на XXI проекте есть номинально рабочий сонар, но из-за помех пользоваться им нельзя; в варианте, когда местным Кулибиным дали поколдовать над корпусом подлодки, сонаром уже можно пользоваться, но страдает дальность обнаружения. По итогу имеем два стула, и совершенно непонятно, какой из них немцы зарезервировали для тестовых подлодок, а какой для серийных. Однако, повторюсь, наиболее логичным будет предположить, что именно последний испытанный тип сонара и был тем вариантом, который предназначался для серийных субмарин.
Ну и третья проблема: дальность обнаружения сонаром SU составляла 3000 метров. Много это или мало? Ну, в целом, это нормально. Повторюсь, если вы собрались использовать сонар для поиска целей в океане, то ваша подлодка в любом случае долго не проживёт, так что этот параметр большой роли играть не будет. Если же вы хотите использовать сонар для наведения торпед, то вам и такой дистанции должно хватать с головой: 3000м всё же лучше, чем 600 ярдов (ох, и сколько же Дёниц дров наломал одним только этим своим решением…). Однако, эту данность вовсе не стоит трактовать таким образом, будто бы немецкое исполнение сонара являлось типичным решением для 1945-года. Это не так. Например, если мы откроем мануал на американский сонар «WCA», устанавливающийся на подлодки типа «Гато», то обнаружим, что дальность обнаружения целей у него составляла 5000 ярдов.
Вот этот шар, который вы можете наблюдать на картинке слева, выполнял роль излучателя. Второй такой шар выполнял роль приемника. Вместе их устанавливали под килем субмарины (т.е. в перевернутом положении, относительно иллюстрации), ближе к носовым торпедным аппаратам. В принципе, ничего такого революционного, достаточно стандартное решение. Например, на эсминцах похожий способ размещения сонара применялся ещё с 1920-х годов. Однако, есть один нюанс: конструкторы в Кригсмарине в этом направлении, что называется, были не в зуб ногой. Когда Рёсслер описывал сонар на XXI серии, он также оставил одну короткую, но крайне примечательную ремарку:
…В лодках Вальтера типа XXVI удалось найти ещё более выгодную позицию для размещения сонара - под носовой частью самой первой секции, на внешней части корпуса. Такое решение позволяло получать пеленг практически со всех направлений, кроме кормы.
Т.е. что мы имеем: тот способ размещения сонара, который американцы использовали ещё с середины войны как минимум, немцы только-только начали обдумывать в 1945-м. И при этом для них это была прям революция, прям сверх прорывное решение. Впрочем, если мы вспомним, что абсолютное большинство немецких подлодок провоевало всю войну вообще без сонара (и без радара, да), то можно сказать, что это ещё был не самый плохой сценарий. Как говорится, лучше поздно, чем никогда.
Гидрофон
С гидрофоном у немцев история сложилась не в пример лучше, чем с сонаром или же радаром. Но, для начала, нужно прояснить некие базовые понятия. Что такое этот ваш гидрофон, как он работает, и для нужен? Ответ на этот вопрос можно довольно легко получить, просто разобравшись в терминологии. Гидрофон, он же шумопеленгатор, имеет ещё одно название, которое чаще всего и встречается в разных справочниках - это пассивный сонар. Из предыдущей части мы знаем, что обычный сонар (он же активный сонар) состоит из излучателя звуковых волн и приёмника звуковых волн. Ещё в 1920-е годы методом практики было выявлено, что для обнаружения подлодок наиболее подходящими являются именно волны высокой часты (сверхзвуковые). При этом большинство других звуков, также насыщающих акустическую среду океана, являются низкочастотными. Включая и шум от работающих машин и винтов кораблей. Далее конструкторы посмотрели на всё это дело и подумали: а что будет, если мы настроим наш приёмник в сонаре на волны низкой частоты? Правильно, наш сонар сможет пеленговать шум винтов от разных кораблей, и при этом излучать никакой сигнал будет не нужно. Так и появился пассивный сонар. Или, вернее будет даже сказать, появился пассивный режим для активного сонара. С течением времени пришло понимание, что использовать саму куполу сонара для обнаружения шума винтов несколько невыгодно, поскольку приходится постоянно перенастраивать оборудование с высоких частот на низкие. Отсюда было принято решение размещать на кораблях отдельные низкочастотные приемники, которые и назывались гидрофонами. Приведенная трактовка событий страдает некоторым анахронизмом, поскольку если начать копаться в истории, то можно выяснить, что вообще-то первые гидрофоны появились ещё до сонаров. Но сейчас для нас это не так важно. Суммируя: гидрофон - это просто такой большой подводный звукоулавливатель, где индикаторным устройством выступает оператор в наушниках. Отсюда, собственно, как все плюсы, так и все минусы гидрофона, относительно других средств обнаружения. К плюсам можно отнести:
1) Гидрофон не имеет демаскирующего эффекта. Вообще. Противник никак не узнает о том, что звук от работающих винтов его корабля пеленгуется на подлодке.
2) Гидрофон, в теории, обладает просто гигантской дальностью обнаружения. Всё дело в том, что звук под водой переносится на весьма приличные расстояния (акустическая проводимость у воды в 5 раз больше, чем у воздуха). Достаточно чувствительный приёмник позволяет нам получить пеленг там, где бы мы ни радаром, ни визуально ничего не увидели. Впрочем, на практике тут есть ряд нюансов, о которых мы поговорим ниже.
3) Гидрофон можно использовать под водой. Собственно, его нужно использовать под водой, по другому он просто не работает. Для использования радара или перископа подлодке нужно находиться на соответствующей глубине, где она будет предельно уязвима как для сонаров, так и для глубинных бомб. У гидрофона таких ограничений нет, ничего не мешает субмарине залечь на дно, и, спрятавшись под всеми термослоями, уже оттуда мониторить обстановку на поверхности.
Недостатки у гидрофона тоже имеются, к ним можно отнести:
1) Невозможность чётко опознать цель. При использовании радара, перископа, или же сонара, оператор может плюс-минус точно сказать, что конкретно он обнаружил: для радара и сонара ключевым параметром здесь будут размеры цели на индикаторе, а в случае перископа там чисто по силуэту всё понятно. Но применительно к гидрофону это правило не работает. Гидрофон никак не проявляет ни размеры цели, ни её силуэт, ни какой-либо другой её признак, кроме шума винтов. Хорошо при этом, если при этом удаётся сразу определить, что это именно шум винтов, а не стая рыб каких-нибудь. При обнаружении целей с максимальной дистанции, никаких других данных, кроме пеленга и примерного уровня шума, с помощью гидрофона субмарина не получит. Да, опытные акустики могут отличить паттерн шума винтов эсминца от, скажем, шума винтов линкора или транспортного судна. Но на дальней дистанции это едва ли возможно. Чтобы акустик мог более точно классифицировать шум, нужно чтобы субмарина физически сократила расстояние до источника этого шума. Что может быть… несколько затруднительно, по ряду обстоятельств.
2) Невозможность определить курс, скорость, и дистанцию до цели. Собственно, это самый большой минус гидрофона. В случае радара и сонара мы определяем дистанцию по времени, которое требуется отраженному сигналу для возвращения обратно. Но в случае гидрофона мы никаких сигналов не посылаем. Следовательно, дистанцию мы не определим. А без определения дистанции не получится определить курс. Добавив сюда невозможность чётко классифицировать цель, выводы напрашиваются довольно неприятные: сам факт наличия контакта на гидрофоне не даёт субмарине вообще ничего. Это может быть конвой где-то далеко-далеко, это может быть эсминец из состава противолодочной группы, или же то может быть просто косяк рыб или мимо проплывающая акула какая-нибудь.
3) Как дальность обнаружения, так и точность классификации гидрофона сильно зависят от погодных условий. Это недостаток, который гидрофон разделяет с сонаром - любой шторм, любое волнение, и вот уже гидрофон начинает глохнуть. Чуть ниже по тексту этот момент будет более чем наглядно проиллюстрирован.
4) Сильная зависимость от собственной скорости корабля-носителя. В чём тут дело: гидрофон может улавливать не только шумы винтов потенциальных целей, но и собственный шум винтов подлодки. В ряде случаев это может быть полезно, поскольку подлодка может сама определять свой уровень шумности, и либо сбавлять скорость хода, либо наоборот его увеличивать. Однако гидрофон не может никак «отсечь» шум винтов подлодки от общего акустического фона. Это означает, что чем быстрее будет двигаться субмарина, тем больше будет уровень помех на гидрофоне из-за работы собственных винтов. Эти помехи будут работать точно также, как и неблагоприятные погодные условия, снижая паспортные характеристики гидрофона. Отсюда и специфичная тактика при работе с гидрофоном: подлодка сначала идёт в надводном положении, потом останавливает дизеля, погружается чтобы прослушать акустический фон, уточняет пеленг, вновь всплывает, и дальше идёт в надводном положении.
Теперь, когда самою базовую часть мы знаем, давайте рассмотрим сам немецкий гидрофон.
Или, вернее даже будет сказать, гидрофоны. Потому что их было несколько. Изначально на немецких лодках ставилось по 24 приемника с каждой стороны в носовой части. Называлось всё это дело «Gruppenрorchgerat» (дословно - слышащее устройство), сокращённо GHG. Тут сразу сделаю оговорку, что под эту аббревиатуру немцы запихивали довольно большой спектр гидрофонов, включая и те, что ставились на надводные суда. Это создаёт исследователям определённые проблемы, т.к. зачастую нельзя сказать, какая конкретная система стояла на какой подлодке. Например, в некоторых вариациях GHG ставилось не 24 приёмника, а 23. А в некоторых вообще 11. В общем, здесь присутствует определённый элемент неразберихи. Как бы то ни было, у GHG был один недостаток - приёмники ставились по бокам носовой части, т.е. непосредственно по центру передней оконечности возникала слепая зона. В попытке решить эту проблему немцы воткнули на верхнюю палубу дополнительный гидрофон под названием KDB, он хорошо различим по своей Т-образной форме. У KDB было ещё одно применение, помимо закрытия слепой зоны в форштевне: из-за отсутствия собственного сонара, немецкие подлодки могли пеленговать импульсы сонаров противника только с помощью гидрофона (это возможно было сделать, настроив фильтрацию на волны высокой частоты). Но в такой конфигурации гидрофон переставал слышать шум винтов, что было проблемой. Поэтому, при столкновении с кораблями эскорта, типичной практикой было настроить один гидрофон на волны низкой частоты, и пеленговать им шумы винтов, а другой - на волны высокой частоты, и пеленговать им импульсы сонаров. Да, криво, да, колхозно, но это более-менее работало. Пока не пришла очередь XXI проекта. На новых лодках как раз планировалось ставить отдельный сонар, так что надобность в KDB несколько сократилась. Однако всё ещё нужно было как-то закрывать слепую зону спереди, так что немцы решили творчески переосмыслить GHG: они взяли все те же 48 гидрофонов, и запихнули их в отдельный обтекатель, чем-то напоминающий гондолу, снизу форштевня. Решение было сочтено достаточно удачным, и в самом конце войны были разработаны специальные гондолы для субмарин VII и IX серии. Можно даже сказать, что от старой схемы размещения GHG образца 1935-го было решено полностью отказаться в пользу гондол. На всякий случай уточню, что все изменения касались исключительно схемы расположения приемников. Сама электронная начинка гидрофона изменений не претерпела. В этом легко убедиться, если начать сравнивать характеристики «нового» и «старого» GHG. Так, применительно к старому GHG Э. Рёсслер пишет следующее:
В хороших условиях, с помощью GHG можно было обнаруживать одиночные корабли на дистанции в 20 км, а конвои - на дистанции в 100 км. Дальность обнаружения здесь зависела от акустической проводимости воды. Как следствие, громкость входящего сигнала не давала чёткого представления о реальном расстоянии до цели. Так, в одном случае, капитан Прин сообщил о бомбовой атаке на свою U-47. Как оказалось впоследствии, акустик запеленговал шум от взрыва бомб, которые немецкий самолёт сбросил на соединение британских кораблей в 100 морских милях от реальной позиции субмарины (KTB, 9 апреля 1940, 16:21).
С помощью этой цитаты мы можем полностью закрыть недостающие части пазла. В большинстве популярных источников, в которых рассказывается о битве за Атлантику, в контексте гидроакустики немецких подлодок приводятся именно эти цифры: 20 км для одиночных судов и 50 км для конвоев. Отдельные авторы, не особо разобравшись в теме, делают отсюда простой вывод: мол, раз номинальная дальность у гидрофона была даже выше, чем у радара, то, следовательно, именно гидроакустика была важнейшим из всех средств обнаружения, доступных подлодке. В реальности, конечно, всё было совсем иначе. Ранее, когда я приводил цитату по поводу испытания сонара SU, читатель мог обратить внимание на одну деталь: дальность обнаружения одиночного корабля с помощью GHG составила максимум 4000 м. Отсюда возникает логичный вопрос: а как у нас 20 000 м в GHG образца 1935-го превращается в 4000 м в GHG образца 1945-го? Как так получилось, что на практических испытаниях дальность просела в 5 раз? Да всё очень просто: погода разная была. В зависимости от состояния среды, гидрофон может как обнаруживать цели на дистанции, превышающую самые рекордные показатели для радара, так и не видеть цель там, где её можно даже визуально разглядеть в перископ. Эти 20 000 м (если они реально были получены на испытаниях, а не рассчитаны задним числом для галочки) возможно выжать из гидрофона только при условии, что на море идеальный штиль, светит солнце, и нет акустических помех поблизости. Как нетрудно догадаться, на практике такие условия встречаются нечасто. Отсюда можно заключить, что паспортная дальность гидрофона нам вообще ничего не говорит. Это чисто бумажный параметр, который пригоден разве что для сравнения одних моделей гидрофонов с другими, и ни для чего больше.
Тем не менее в рамках настоящей статьи GHG образца 1945-го всё ещё нужно как-то оценить. Удалось ли немцам создать современный вариант гидрофона? Ну, в целом, скорее нет, чем да. В чём тут вся соль: из-за отсутствия радара и сонара, Кригсмарине всю войну строило гидрофоны т.н. обсервационного типа. Иными словами, немцы хотели, чтобы их подлодки находили себе цели в океане с помощью гидрофонов. По этой причине, их не особо смущала слепая зона по носу на раннем GHG, а так же тот факт, что с точки зрения управления огнём оснащение поста гидроакустики было не очень адекватным (но об этом потом). Если мы посмотрим, к примеру, на американские подлодки, то мы обнаружим что там обсервационных гидрофонов нет вообще. Вместо них там стоит по одному T-образному гидрофону для управления огнём типа JP. Утрированно: представьте, как если бы немцы полностью отказались от GHG, и вместо этого оставили у себя только KDB, и вы примерно получите ту конфигурацию, в которой американские подлодки прошли всю войну. Вот только тут есть один нюанс: у американского JP номинальная дальность обнаружения одиночной цели составляла 20 000 ярдов (об этом можно прочитать, например, здесь). Ещё раз, для ясности: у американского гидрофона управления огнём была такая же дальность обнаружения, как у немецкого обсервационного гидрофона. Если бы мы сравнивали подлодки какой-нибудь IX серии с «Гато», то я бы только за один лишь этот пункт изошёлся ядом страниц на пять. Но сейчас ситуация к этому не располагает. Дело в том, что немцы были одними из первых (если не самыми первыми), кто всерьёз озаботился вопросом помехозащищенности на своих гидрофонах. Поскольку в дневное время электролодка должна была идти в подводном положении на электромоторах с крейсерской скорость в 9-10 узлов, то вопрос со средствами обнаружения становился особенно неприятным: радаром пользовать нельзя, а перископ, и сонар сильно демаскируют лодку. Остаётся гидрофон. Но гидрофон на такой скорости ничего слышит. Получается, что для использования гидрофона лодке придётся постоянно глушить и потом снова запускать электромоторы, сокращая, тем самым, реальную среднесуточную скорость. Такая ситуация никуда не годится, поэтому в Кригсмарине и научились все эти эксперименты с обтекателем: нужно было любой ценой заставить гидрофон обнаруживать цели ну хотя бы на крейсерской скорости. И вот с этой конкретной задачей немцы таки справились. GHG образца 1945-го года мог выдавать стабильный пеленг при таких собственных скоростях лодки (примерно 10 узлов и ниже), на которых Т-образные гидрофоны не слышали вообще ничего. Так что же в итоге получается, неужели под самый занавес войны в Кригсмарине таки смогли уйти от колхоза, и создать нормальный, адекватный времени гидрофон? Ну, в целом, нет. Гидрофон на XXI серии был нормальный, это правда, но он точно не был адекватен времени. В чём тут подвох заключался: по состоянию на 1945-й год уже появился новый тренд в гидроакустике, а именно - второй гидрофон на корме лодки.
Задумка здесь была настолько простой и, в то же время, гениальной, что невольно начинаешь задумываться, почему же этого не придумали раньше: когда гидроакустик начинает слушать шум винтов, он передаёт данные о пеленге на командный пост; там этот пеленг наносят на плоттер; визуально это будет выглядеть, как если бы от носа субмарины просто провели одну бесконечную прямую в указанном направлении; далее субмарина начинает поворачиваться относительно пеленга, чтобы задействовать второй гидрофон на корме; в идеальной ситуации, которая представлена на иллюстрации выше, субмарина будет повернута перпендикулярно кораблю-цели; затем гидроакустик сообщает пеленг со второго гидрофона, и его тоже наносят на плоттер; в итоге мы имеем две прямые, которые уходят от субмарины к цели; на плоттере эти две прямые формируют стороны треугольника, а корпус субмарины формирует основание; после этого нам осталось только вспомнить школьный курс геометрии, и найти длину любой из сторон - это и будет дальность до цели. Отсюда можно нехитрыми манипуляциями также определить и курс: меряем дальность, и отмечаем на плоттере первую точку, в которой находится цель; ждём 5 минут, снова меряем дальность, снова отмечаем точку; соединяем эти две точки отрезком; направление отрезка будет указывать нам на курс цели. Соответственно, отсюда также можно вычислить скорость - нужно будет просто поделить длину отрезка на 5 минут. В итоге, пользуясь одним лишь гидрофоном и больше ничем, мы установили не только пеленг цели, но также ещё и дальность, курс, и скорость. Неплохая такая инновация, согласитесь? Осталось только разобраться, у кого же такая крутая игрушка впервые нашлась, и как в этом отношении дела обстояли у Кригсмарине. Интриги здесь никакой не будет: придумали это дело американцы, в самом конце 1944-го.У Кригсмарине же ничего подобного не было даже в набросках. Т.е. итоговая оценка GHG будет несколько смазана этим обстоятельством. Как можно в итоге оценить GHG образца 1945-го? Ну, я бы сказал так: усреднённый вариант, примечательный разве что своей помехоустойчивостью.
На этом пока всё. В следующей части мы посмотрим на то, как на XXI серии была реализована защита от сонара, а также разберём некоторые мифы, касательно атакующих возможностей подлодки:
Автор: Андрей Зайцев
Список источников
- «Report 2G-21: Former german submarines», 1946.
- Eberhard Rössler, «The U-boat: The Evolution and Technical History of German Submarines», 1981.
- Eberhard Rössler, «The Type XXI U-Boat (Anatomy of the Ship Series)», 1991.
- Jak P. Mallmann Showell, «Hitler's Navy: A Reference Guide to the Kreigsmarine 1935–1945», 2009.
- Jak P. Mallmann Showell, «Hitler's Attack U-Boats: The Kriegsmarine's WWII Submarine Strike Force», 2020.
- Malcolm Llewellyn-Jones, «The Royal Navy and Anti-Submarine Warfare, 1917–49», 2005