Одна из задач теории механизмов и машин состоит в нахождении относительных значений и направлений угловых скоростей звеньев планетарного механизма методом планов. Здесь это будет показано на следующем примере.
Пример. Четырехзвенный планетарный редуктор (рис. 8.12). Исходные данные: передаточное число U1H(3) = 6,3; модуль m = 2 мм.
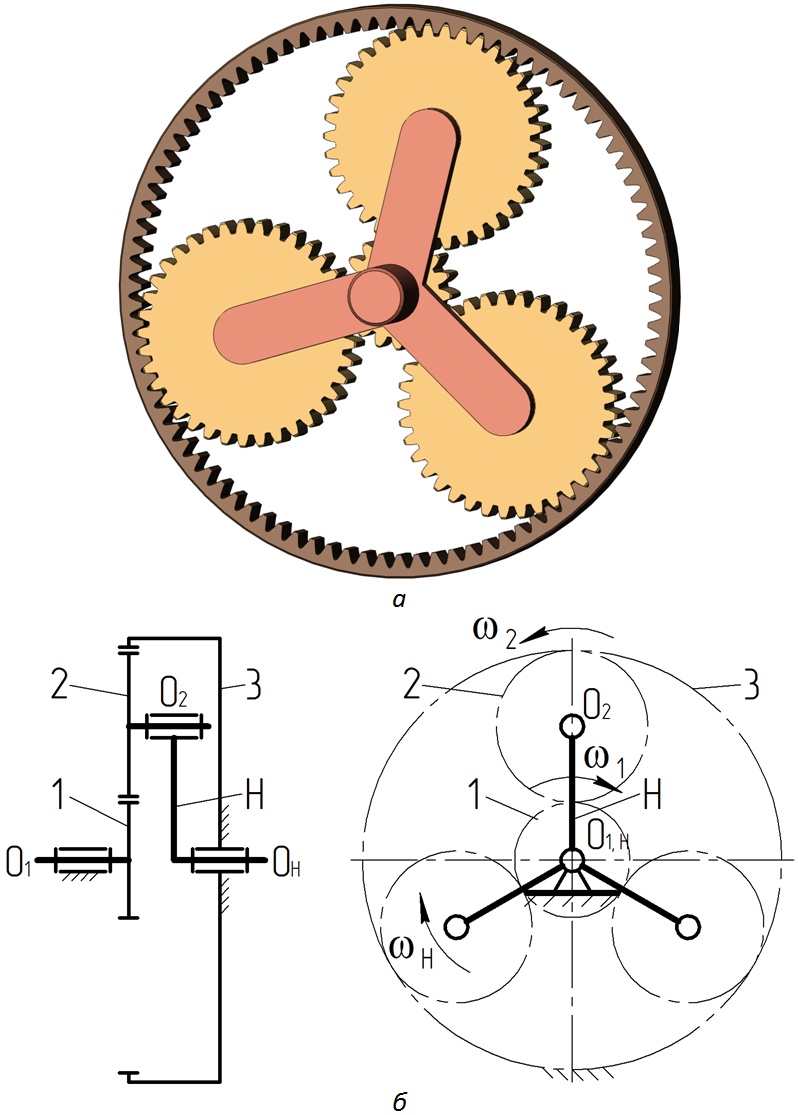
Синтез планетарного механизма, как правило, начинается с подбора числа зубьев зубчатых колес для заданного передаточного числа. В механизме три зубчатых колеса, из которых центральное колесо 1 входит во внешнее зацепление с сателлитом 2, а сателлит 2, в свою очередь, – во внутреннее зацепление с опорным колесом 3. Следовательно, в обеих парах межосевое расстояние является одинаковым и формулу (8.6) можно записать с числами зубьев z1 и z2

которая после преобразования примет вид
откуда
Далее, задаваясь числом зубьев, например, центрального колеса 1, можно рассчитать число зубьев сателлита 2. Если принять z1 = 17, то
В результате, число зубьев сателлита следует принять 37.
Число зубьев опорного колеса
Число сателлитов должно побираться таким образом, чтобы выполнялось условие сборки, исключающее попадание зубьев колес друг на друга
где K – число сателлитов; q– целочисленное число (как и число сателлитов). Для рассматриваемого примера
С целью достижения сбалансированной конструкции число сателлитов рекомендуется принимать не менее трех. Максимальное число сателлитов следует проверять по условию соседства
Таким образом, в проектируемую конструкцию войдет не более трех сателлитов.
Для построения схемы планетарного механизма (рис. 8.13) необходимы диаметры начальных окружностей колес. Начальный диаметр ведущего колеса для любой зубчатой пары можно рассчитать по следующей формуле
где знак «плюс» используется при наружном зацеплении, а знак «минус» – при внутреннем.
Начальный диаметр ведомого колеса в случае наружного зацепления
Поскольку в рассматриваемом примере z1 = 10...30, а z2 > 30, коэффициенты смещения согласно ГОСТ 16532-70:
- для центрального колеса 1 х1 = 0,5;
- для сателлита 2 х2 = 0.
Расчет остальных необходимых параметров для наружного зацепления выполняется по известной методике (табл. 8.1).
Формулы (7.22) и (7.23), упоминаемые в табл. 8, можно посмотреть в лекции ТММ#7 Зубчатые зацепления.
Диаметр начальной окружности опорного колеса 3 в рассматриваемом примере
В зацеплении опорного колеса 3, обладающего 91 зубом, с сателлитом 2 должен сохраняться угол профиля 22,543° (табл. 8). При этом коэффициент смещения сателлита 2 должен оставаться равным 0.
Достичь заданный угол профиля можно посредством коэффициента смещения x3 опорного колеса 3. Чтобы его определить следует воспользоваться формулой (7.79)
где индексы соответствуют номерам колес рассматриваемого примера. Коэффициент смещения x3 из формулы (8.32)
Расчет остальных необходимых параметров для внутреннего зацепления выполняется по известной методике (табл. 8.2). Межосевое расстояние для внутренней пары
должно получиться равным межосевому расстоянию для наружной пары.
Используя диаметры начальных окружностей (dw1 = 34,593 мм; dw2 = 75,29 мм; dw3 = 185,173 мм), можно вычертить схему планетарного механизма в масштабе.
План линейных скоростей (рис. 8.13) можно построить следующим образом.
1. Точка A принадлежит центральному колесу 1. Скорость точки A (см. вид слева) направлена перпендикулярно отрезку OA. На плане она изображена вектором <Aa>, длина которого назначается произвольно.
2. Точка B принадлежит водилу H и центру сателлита 2. Скорость этой точки направлена перпендикулярно отрезку OB в ту же сторону, что и скорость точки A, поскольку передаточное отношение механизма является положительным.
3. Для установления величины вектора <Bb> скорости точки B следует соединить точки A и C. Точка C здесь принадлежит опорному колесу 3, скорость которого равна 0.
4. Полученные точки a и b на плане линейных скоростей следует соединить с точкой O.
План угловых скоростей строится на основании плана линейных скоростей.
1. По вертикали намечаются точки P и O, отстоящие друг от друга на произвольном расстоянии.
2. Из точки O проводятся отрезки:
- <O1> – параллельно отрезку Oa на схеме механизма;
- <OH > – параллельно отрезку Ob на схеме механизма;
- <O2> – параллельно отрезку aC на схеме механизма.
Проведенные отрезки ограничиваются горизонтальной прямой, проведенной из точки P. Полученные величины <P1>, <PH> и <P2> пропорциональны угловым скоростям ω1, ωH и ω2. В результате, передаточное отношение планетарного редуктора по плану угловых скоростей
что приближенно соответствует его аналитическому значению