Благодаря своим уникальным характеристикам, MOSFET-триггеры находят применение в самых разных областях, от бытовой электроники до промышленных систем управления. Их высокая скорость переключения, низкое энергопотребление и легкость интеграции делают их незаменимыми в самых разных областях.
В работе с FPV дронами нередко возникают ситуации когда требуется управление питанием дополнительных устройств. MOSFET триггер как нельзя кстати подойдет для этой задачи.
Сегодня для управления внешним устройством мы воспользуемся системной функцией полетного контроллера - PINIO.
MOSFET триггер: характеристики и особенности подключения
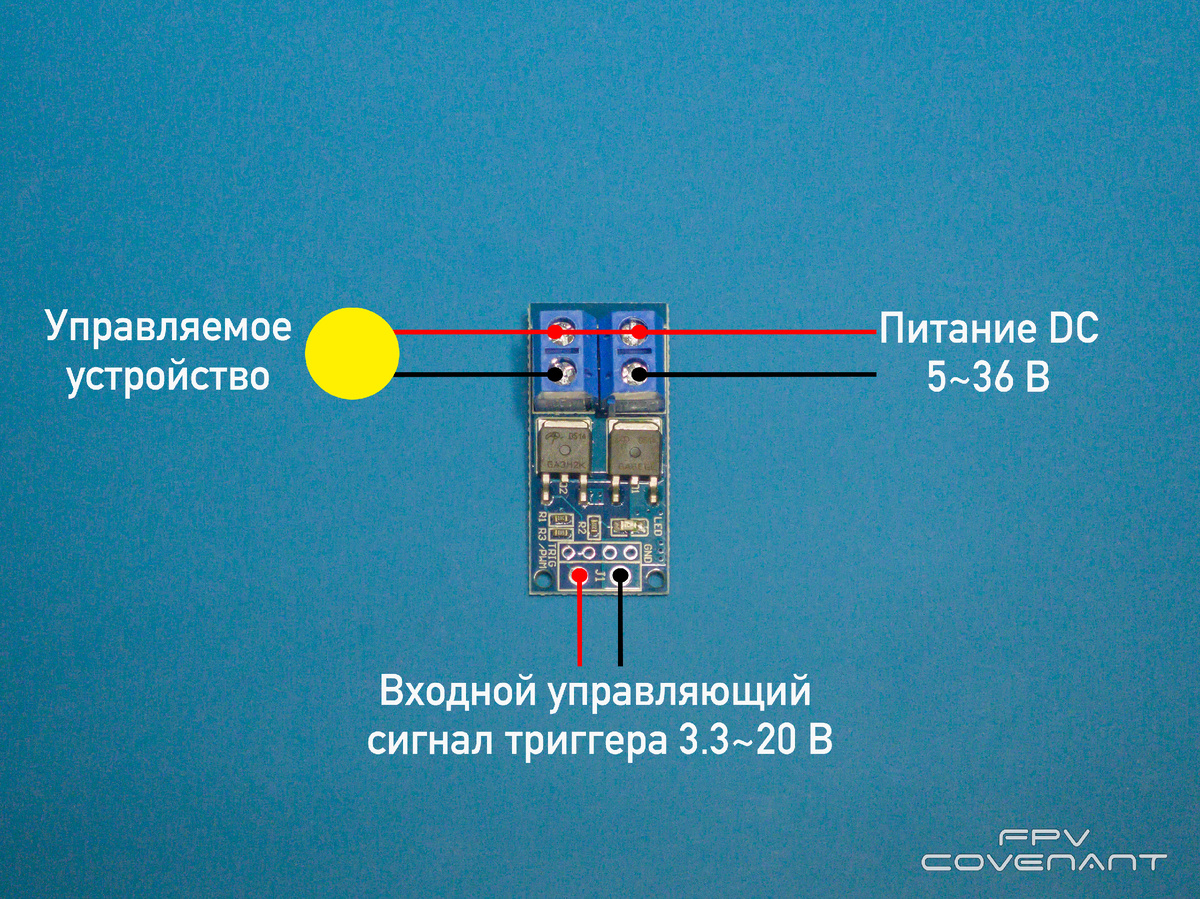
Нам в руки попал китайский модуль непонятного бренда реализованный на двух полевых транзисторах D4184, включенных параллельно. Управление осуществляется подачей на вход напряжения 3,3 В - 20 В. Это позволяет управлять нагрузкой как непосредственно от микроконтроллера без применения промежуточных драйверов, так и внешними сигналами от различных источников управляющего напряжения. Рассмотрим схему подключения.
MOSFET-триггеры находят широкое применение в различных областях:
• Импульсные источники питания: Используются для управления преобразованием энергии с высокой эффективностью.
• Усилители: Применяются в аудиосистемах для управления выходной мощностью.
• Системы управления двигателями: Используются для управления скоростью и направлением вращения электрических моторов.
• Светодиодные драйверы: Применяются для управления яркостью светодиодов.
• Автоматизация и управление: Используются в системах автоматизации для управления различными устройствами и механизмами.
Характеристики:
• Рабочее напряжение триггера: от 3.3 В до 36 В постоянного тока DC.
• Источник сигнала триггера: от 3.3 В до 20 В постоянного тока DC.
• Максимальный выходной ток: 15 А (без установки теплоотводящего радиатора).
• Максимальный выходной ток: 30 А (с радиатором).
• Переключение может осуществляться с частотой от 0 до 20 кГц.
• Максимальная мощность: 400 Вт
• Рабочая температура: от -40 до 85 °C
• Размеры: 34 × 17 × 12 мм
MOSFET-триггер может быть подключен к порту ввода-вывода микроконтроллера, интерфейсу ПЛК, источнику постоянного тока.
Попробуем подключить к простейшему генератору сигнала наш триггер и поуправлять светодиодной лампой.
Как мы видим минимальное напряжение 3.3 вольта позволяет запустить устройство (в нашем случае - светодиодная лампа). Изменяя длительность сигнала мы можем регулировать яркость свечения.
Как же триггер подключить к FPV дрону? Сначала в голове промелькнула мысль использовать функцию SERVO. Но сервопривод настраивается на минимальную и максимальную длительность сигнала и полного отключения не происходит. Buzzer казалось бы самое простое решение, но мы воспользуемся функцией PINIO. С ее помощью можно использовать любые неиспользуемые контакты полетного контроллера. Посмотрим что получится!
PINIO и PINIO_BOX: настройка полетного контроллера FPV дрона
Все настройки полетного контроллера мы стараемся проводить предварительно сохранив всю конфигурацию. Загружаем Betaflight Configurator. Подключаемся к полетному контроллеру по usb. Переходим в командную строку и вводим команду dump all и нажимаем кнопку сохранить в файл.
В случае какой-то непредвиденной ситуации этот сохраненный файл поможет нам восстановить работоспособность FPV дрона.
Функция PINIO позволяет нам задействовать абсолютно любые свободные ресурсы которые мы захотим, и управлять ими. Когда на полетном контроллере нет выводов на Биппер или LED, можно под них назначить любой свободный UART или вывод моторов как раз с помощью функции PINIO.
Вводим в командной строке команду resource. Так как мы решили воспользоваться свободным выводом от мотора М5, то смотрим в списке какой вывод принадлежит ему - это B00.
Далее освобождаем мотор М5 от вывода B00 командой resource motor 5 none.
Далее назначаем выводу B00 специальный ресурс PINIO. Их предусмотрено всего 4, а значит всего 4 вывода мы сможем управлять сами. Чтобы просмотреть свободные выводы нужно ввести команду get PINIO_BOX.
Мы получаем такой ответ:
pinio_box = 0,255,255,255
Array length: 4
Каждое число ответа показывают статус ресурсов PINIO. Число 0 - означает что на первом ресурсе прикреплена функция ARM, число 255 - означает что данный ресурс свободен. В нашем случае первый ресурс занят, а остальные три - свободны.
Мы будем использовать 2 ресурс PINIO. Для начала назначим ему вывод который мы отняли у мотора 5. Для этого вводим команду resource PINIO 2 B00.
Теперь нам требуется для 2 ресурса PINIO назначить свободную пользовательскую функцию USER1. Для этого вводим команду set PINIO_BOX = 0,40,255,255 Как мы видели ранее первое число 0 это задействованный PINIO 1. Второе число 40 это наша команда для того чтоы к PINO 2 назначить функцию USER1. Третье и четвертое число 255 значит что PINIO 3 и PINIO 4 пока свободен.
Незабываем ввести команду save по окончанию настроек.
Значения PINIO (представим несколько):
USER1 - 40
USER2 - 41
USER3 - 42
USER4 - 43
ARM - 0
Свободная ячейка - 255
Предварительные настройки PINIO проведены. Припаиваем провода к полетному контроллеру на настроенные контакты М5 и G.
Загружаем снова Betaflight Configurator, подключаем к дрону пульт, переходим во вкладку - приемник. Определяем канал той кнопки, на которую хотим назначит управление нашим контактом. Дергая переключатель на пульте видим что отзывается канал AUX4.
Далее переходим во вкладку - режимы. Находим пользовательский режим USER1 и назначаем ему канал управления AUX4. Далее требуется выделить диапазон, в каком тумблер включиться.
На этом этапе настройка окончена! Теперь интересно узнать, что за сигнал выдает наш контакт при включении тумблера на ножке М5. Сохраняем все настройки, перезагружаем fpv дрон и подключим наш измерительный прибор на ножку М5. Переключая тумблер мы видим появление постоянного напряжения 3.2 вольта.
Подключение MOSFET триггера к FPV дрону
Заключительный этап - собираем схему с нашим MOSFET триггером. Итак - управляющий сигнал мы берем с ножки М5 (как мы рассказали в статье можно использовать любую ножку). Питание мы можем взять либо с любого вывода полетнного контроллера +5 или +12 (при наличии) либо если нам нужно однократное срабатывание - можно взять с аккумулятора.
При переключения тумблера на пульте управления сигнал поступающий с полетного контроллера открывает транзистор и наш контрольный светодиод загорается.
Посмотрим на примере оппонента. Хитрый пилот использует свободный канал UART3 и настроив функцию PINIO управляет своими ловушками закрепленными на дронами. Тут возможна работа в двух исполнениях - как предохранитель и как удаленный запуск ловушки по команде пилота с тумблера.
Функция PINIO является важной частью архитектуры FPV дронов в управлении и связи между различными компонентами системы. Знания принципов ее работы значительно расширяют возможности пилота.