Исследователи из Института робототехники Университета Карнеги-Меллона предложили новую вычислительную модель, которая позволит роботам обращаться с тканями. Ученые разработали систему на основе несколько сенсоров - визуальных и тактильных, и применили машинное обучение.

Когда человеку необходимо взять верхнее полотенце из стопки, он не задумывается насколько это сложная задача. Чтобы взять только верхнее полотенце зрения недостаточно. Необходимо сложное сенсорное восприятие - чувствительные пальцы. Мы берем верхнее полотенце наощупь.
Ткани имеют разный вес, разную гладкость и толщину. Ткань изгибается, меняет визуальную форму, "морщит" и одной только камеры (зрительного сенсора) для того, чтобы отделить один слой от стопки, недостаточно. Нужно - осязание.
Ученые из Института робототехники Университета Карнеги-Меллон сделали этот шаг. Разработанный исследователями робот снабжен камерой и тактильным сенсором. Он учится ощупывать ткань, находить край и поднимать только верхнюю ткань в большой стопке.
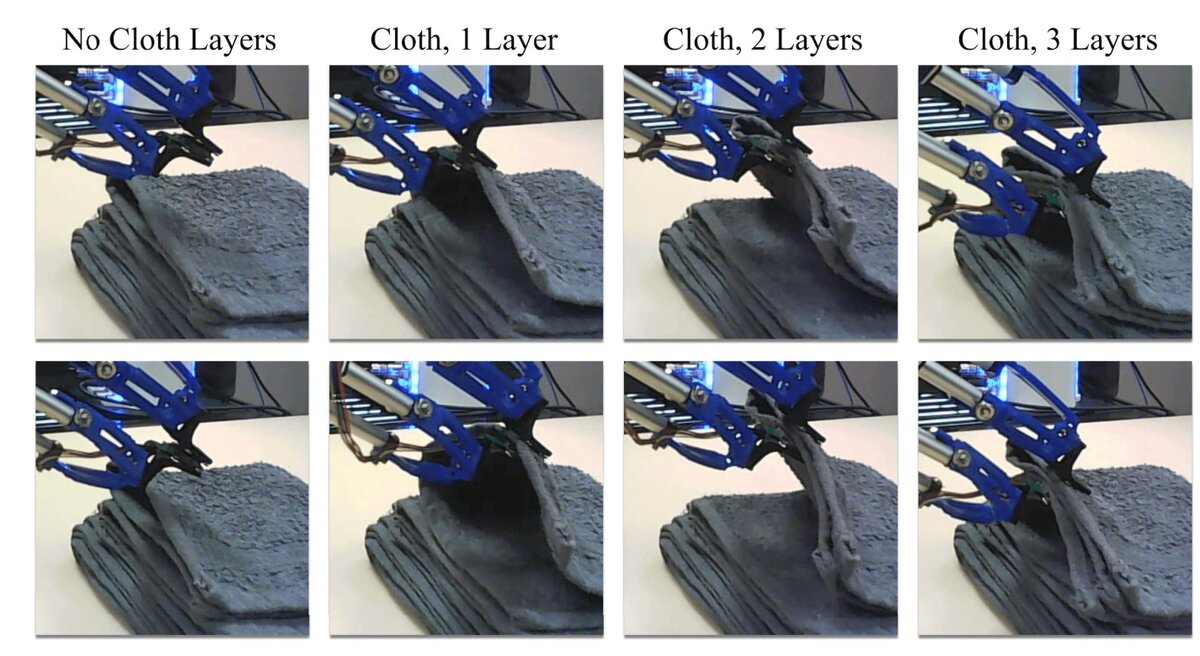
Чтобы оценить свою работу, команда провела 180 экспериментальных испытаний в реальных условиях, используя роботизированную систему, состоящую из роборуки Franka, захвата mini-Delta и датчика Reskin (встроенного в «палец» захвата).
«По сравнению с предыдущими подходами, в которых использовались только камеры, на наш подход, основанный на тактильных ощущениях, не влияют ни рисунки на ткани, ни изменения освещения», — говорят исследователи. «Сенсорный датчик обеспечивает достаточную чувствительность для тонких манипуляций с тканью».
Исследователи надеются, что разработанный ими метод расширит возможности роботов и на предприятиях по производству тканей, и в прачечных, и дома.
Домашний помощник
Мы стараемся сделать робота-помощника и умение манипулировать с тканями необходимо. Разобрать одежду, постельное белье, загрузить в стиральную машину, вынуть и развесить на сушилке, снять (предварительно проверив на ощупь - высохло ли?) и разложить на полке в шкафу. Это пока еще только будущее, хотя и такое уж далекое.
В создании робота-помощника уже сделано много. Например, разработан робот, который учится домашней работе просто наблюдая за действиями человека и стараясь эти действия повторить (Мы о таких роботах писали - этим занимается другая команда тоже из Университета Карнеги-Меллон и еще одна из Университета Беркли ).
Робот, умеющий "ощупывать" ткань, снабженный тактильным сенсором, это серьезный шаг в создании домашнего робота-помощника.



















