Инженеры из Массачусетского технологического института (MIT) разработали робота-cыщика, который может отыскать любой предмет, не находящийся в зоне его видимости. Для этого он использует специальные алгоритмы и посылает сигналы, которые отражают разные типы предметов.
Исследователи представили роботизированную руку, которая комбинирует визуальную информацию и радиочастотные сигналы для поиска объектов. Алгоритм системы — FuseBot — определяют вероятное местоположение и ориентацию искомых предметов, находящихся, например, под грудой других вещей. Затем он находит наиболее эффективный способ удаления мешающих предметов и то, как лучше всего извлечь то, что ему нужно. Такой подход позволил FuseBot находить больше спрятанных предметов и в два раза больше, чем предыдущая аналогичная роботизированная система.
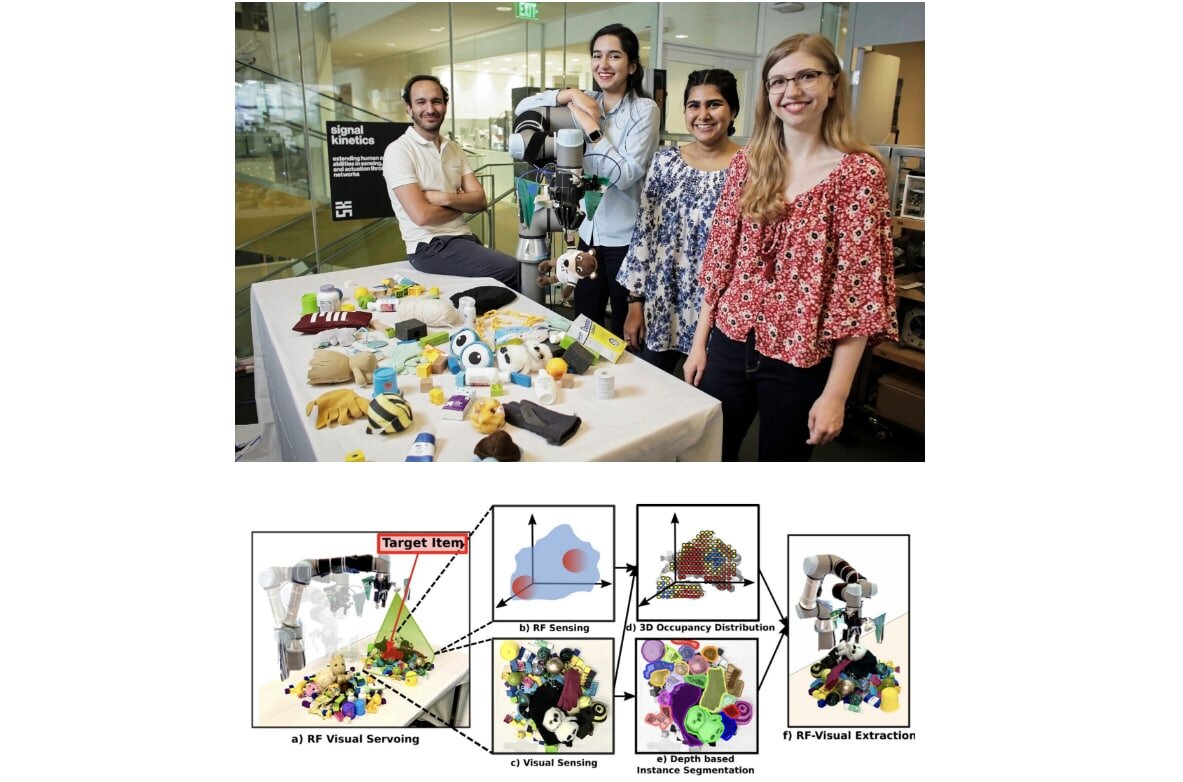
В системе FuseBot роботизированная рука использует видеокамеру и радиочастотную антенну для извлечения немаркированного предмета из общей смешанной кучи вещей. Система сканирует кучу камерой, чтобы создать 3D-модель окружающей среды. Поскольку радиоволны могут проходить через большинство твердых поверхностей, робот «видит», что происходит внутри кучи или под землей.
Такие навыка робота очень пригодятся не только для поиска потерянных вещей, но и, например, на складе маркетплейсов и больших магазинов. Робот, которому можно поручить обрабатывать возвраты, легко научится находить предметы в неотсортированной куче.



















