В июне 2021 г. компания Dive Technologies (Massachusets, США), специализирующаяся в области подводной робототехники, заявила о планах постройки разработанного ею глубоководного необитаемого подводного аппарата (НПА) DIVE-LD (Large Displacement), предназначенного для геофизических исследований, инспекций подводных кабелей и других объектов инфраструктуры. Разработка велась с 2019 г. совместно со специалистами Политехнического института и Центра морских робототехнических систем Технологического университета (Virginia, США).
НПА должен быть передан компании Kraken Robotics (Канада) для оснащения необходимыми датчиками и системами, в частности, интерферометрической гидроакустической системой с синтезированной апертурой «Aqua Pix» MINSAS (Miniature Interferometric Synthetic Aperture Sonar) и лазерным 3D-сканером «SeaVision».
Ранее, в августе 2020 г. компании Dive Technologies и Kraken Robotics заключили соглашение о применении технологии аккумуляторных батарей, устойчивых к высокому давлению, при этом компания Kraken Robotics получила права на лицензионное строительство двух НПА DIVE-LD в Канаде.
Однако первый промышленный образец будет построен компанией Dive Technologies в США и передан предприятию компании Kraken Robotics, расположенному в Центре океанских исследований Канады (Dartmouth, Nova Scotia, Канада).
В том же месяце компания объявила, что сотрудничает с Центром подводных исследований ВМС США NUWC INewport, Rod-Island), где проводились испытания НПА с установленной на нем инерциальной навигационной системой SPRINT-Nav X компании Sonardyne International (Великобритания), доплеровским лагом Doppler Velocity Log и гидроакустической системой MINSAS 120.
Испытания НПА, оснащенного гидроакустической системой «AquaPix» MINSAS 120, проводились также в марте-апреле 2021 г. в мелководных районах заливов Buzzards (12-61 м) и Narragansett (3-12 м). На НПА был установлен совместимый с гидроакустической системой специальный модуль хранения данных Data-Pod.
Гидроакустическая система MINSAS 120 предназначена для работы на глубинах до 1000 м при скорости хода 2-6 уз, хотя опционально может использоваться и на глубинах 3000-6000 м.
Приемопередающие элементы объединены в единую монолитную решетку, установленную рядом с электронным модулем. Кроме того, гидроакустическая система оснащена двумя рядами идентичных приемных элементов, способных получать подробные трехмерные батиметрические данные в реальном времени с разрешением 25*25 см при точности в вертикальной плоскости до 10 см на расстоянии 100 м.
В состав гидроакустической системы входит модуль первичной обработки информации в реальном времени с записью на жесткий диск RealTime SAS, который также поддерживает автоматическое распознавание цели и дополнительную фильтрацию обработанных данных.
В отличие от стандартных гидроакустических систем бокового обзора, способных получать изображения морского дна с высоким разрешением на небольших дальностях, гидроакустическая система MINSAS 120 может генерировать изображения с разрешением 2,5 см при движении вперед и 1,5 см при боковом сканировании при постоянной разрешающей способности и высоком соотношении сигнал/шум на дальностях до 220 м с любого борта носителя при движении со скоростью до 3 уз. При этом скорость обзора поверхности составит 1,71 км2/час. без вспомогательной гидроакустической системы для перекрытия мертвых зон и 2,44 км2/час. при ее использовании.
НПА DIVE-LD оснащен устойчивыми к высокому давлению аккумуляторными батареями SeaPower компании Kraken Robotics. Они рассчитаны на работу на глубинах до 6000 м и состоят из одного или нескольких литий-полимерных аккумуляторов, размещенных в модульных блоках для соответствия конкретным требованиям по емкости и напряжению.
Каждый батарейный блок оборудован системой управления, которая постоянно отслеживает состояние и работоспособность батареи. Кроме того, в блоках используется запатентованная компанией технология силиконовой герметизации, устойчивой к давлению, которая защищает литий-полимерные элементы от морской воды.
Силиконовая изоляция устраняет необходимость в кожухах высокого давления или масляных компенсаторах, что снижает массу и стоимость НПА. Первые испытания аккумуляторов SeaPower на борту НПА были завершены в октябре 2020 г. Они будут установлены на третий серийный образец НПА DIVE-LD.
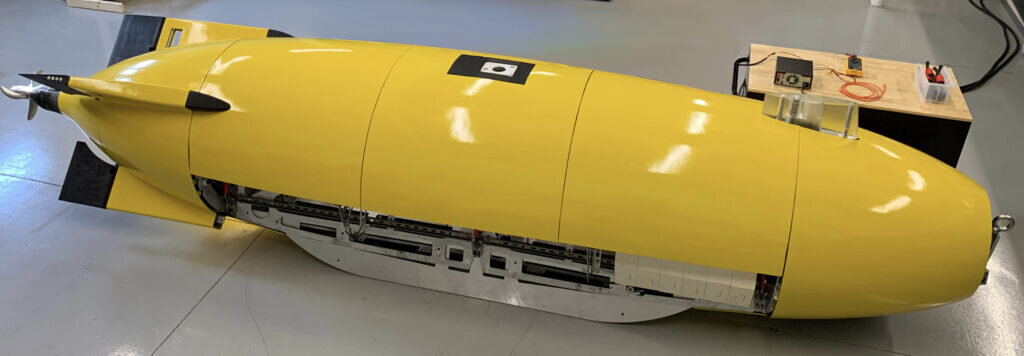
Для минимизации гидродинамического сопротивления НПА DIVE-LD имеют каплеобразную форму. Согласно спецификации компании, сухая масса НПА составляет 2720 кг, длина - 5,8 м, диаметр - 1,2 м. Корпус также может изготовляться для работы на глубинах 300, 3000 или 6000 м.
Предусмотрен отсек для полезной нагрузки со свободным затоплением емкостью 1,3 м3. Связь с оператором осуществляется на частоте 900 МГц, имеется Wi-Fi канал и система спутниковой связи Iridium. Питание обеспечивается съемной литий-полимерной батареей емкостью 93 кВт/час., размещенной в нижнем поддоне. Скорость хода НПА — 2-7 уз, дальность достигает 313 морских миль.
Для ускорения процесса строительства НПА и снижения затрат компания Dive Technologies заключила соглашение о сотрудничестве в области НИОКР с Национальной лабораторией Oak Ridge и потратила около двух лет на изучение технологии широкоформатного аддитивного производства для создания компонентов корпуса первого образца НПА DIVE-LD. Для создания элементов внешних обтекателей корпуса НПА использовался ЗD-принтер Cincinnati Incorporated Big Area Additive Manufacturing (принадлежал компании AES), а также принтеры меньшего размера для внутренних компонентов НПА. Внешний корпус НПА состоит из девяти трубчатых обтекателей, напечатанных из термопластичного полимера акрилонитрил-бутадиен-стирол с наполнителем из рубленого углеродного волокна, поставляемого компанией SABIC (базируется в Эр-Рияд, Саудовская Аравия).
Общее количество напечатанных на ЗD-принтере деталей составляет около 77, включая кронштейны, внутренние крепления для подключения датчиков, двигателей и другого оборудования к корпусу. Наружные обтекатели корпуса НПА DIVE-LD и ряд внутренних компонентов изготавливаются с использованием процессов аддитивного производства и запатентованного процесса сглаживания и покрытия неровностей, образовавшихся при печати, для улучшения гидродинамических характеристик. В ходе исследований в период 2019-2020 гг. были протестированы различные варианты покрытий и оценены с точки зрения простоты нанесения и обеспечения живучести на глубине 6000 м.
На НПА DIVE-LD будет установлен полный набор систем навигации, слежения и управления компании Sonardyne International (Великобритания), включая лаг SPRINT-Nav X, гидроакустическую систему SonarDyne AvTrak 6, систему подводного слежения Ranger 2 USBL и др.
На НПА DIVE-LD планируется использовать пакет ПО ANCC (Autonomy, Navigation, Command & Control), разрабатываемый компанией Metron (Virginia, США), который позволит ему действовать полностью автономно, без участия человека.
По данным компании, ПО содержит алгоритмы планирования и решения таких задач, как выполнение дальних переходов, исследование дна и толщи воды, предотвращение столкновения с препятствиями и др. с учетом динамики аппарата. Это позволяет НПА самостоятельно корректировать предварительно запрограммированные планы решения задач и маршруты движения или разрабатывать новые на основе информации о состоянии окружающей среды, получаемой от бортовых датчиков. Это особенно важно, учитывая большую продолжительность нахождения НПА в море - до 10 суток.
Специалисты компании Dive Technologies продолжают работы по совершенствованию гидродинамических характеристик НПА, направленные, в частности, на повышение точности маневрирования, а также по снижению энергопотребления энергоустановкой.
По данным компании Virginia Tech, Центр морской автономии и робототехники разрабатывает новую конфигурацию движителя, которая потенциально может потреблять на 20 % меньше энергии, чем обычный гребной винт, при этом создавая меньшее шумоизлучение. Специалисты компании внесли изменения для оптимизации диаметра и шага гребного винта, а также его продольного расположения с учетом взаимодействия гребного винта и потока обтекания корпуса.
Однако, несмотря на то, что конструкция корпуса обеспечила хорошие гидродинамические характеристики, возникли определенные проблемы при маневрировании. В связи с этим начаты исследования применимости туннельных подруливающих устройств для маневрирования на малых скоростях.
#необитаемый подводный аппарат #автономность #3d принтер #вмс сша #наука #технологии #исследование #углеродное волокно #емкость батареи #полимер



















