Учёные из Лаборатории высокопроизводительной робототехники Калифорнийского университета в Беркли представили свою новую разработку под названием Midair Recognifigurable Quadracopter. Это беспилотник, особенностью которого стала возможность складываться в воздухе.
Классические квадрокоптеры традиционно имеют твёрдую конструкцию, состоящую из четырёх развёрнутых осей. Это ограничивает их возможности и мешает им выполнять определённые задачи. Новый экспериментальный беспилотный аппарат лишён этого недостатка. Его раздвинутые оси могут при необходимости складываться прямо во время полёта.
Подобные разработки пытались внедрить при помощи электрических приводов, однако это потребляет энергию батареи и усложняет устройство летательного аппарата. В Midair Recognifigurable Quadracopter используются неактивные шарниры, что позволяет каждой из его осей опускаться по мере необходимости под воздействием гравитации или обратной тяги.
Беспилотник научился делать ряд манёвров. Если горизонтально летящее устройство должно протиснуться сквозь узкое вертикальное отверстие, то квадрокоптер может поменять направление тяги на две противоположные оси, заставляя их сложиться. Учитывая прямоугольный корпус дрона, крутящий момент, создаваемый сложенными осями, противодействует крутящему моменту, создаваемому двумя другими осями. Это позволяет коптеру плавно и легко пройти сквозь проём. Таким же образом он может переносить небольшие предметы, например, коробку с плоскими сторонами, зажимая её между двумя осями.
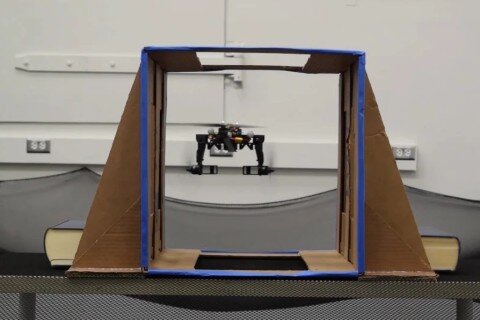
Чтобы спуститься сквозь узкое горизонтальное отверстие, все четыре пропеллера меняют направление тяги, из-за чего все оси складываются, а коптер переходит в режим свободного падения. Преодолев узкое расстояние, он возвращает тягу в исходное состояние. Оси поднимаются, квадрокоптер возобновляет зависание, а затем может двигаться дальше.
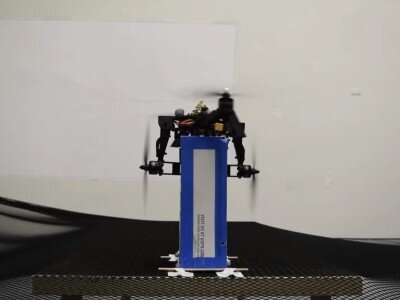
Midair Recognifigurable Quadracopter может успешно приземляться на линии электропередач и какое-то время находиться там без движения. Для этого он выключает все свои пропеллеры, а его оси спускаются, смещая центр массы коптера ниже точки соприкосновения, что позволяет удерживать равновесие.