Всем привет!
Сегодня расскажу о том, как я управляю различными моделями, как самодельными так и в принципе любой другой. Тема довольно избитая, но хочу вставить свои "пять копеек".
Итак, что требуется чтобы управлять чем либо на расстоянии? Правильно - передатчик и приемник. Какой? Тут ответ не так очевиден. Сейчас наши "китайские партнеры" завалили рынок всевозможной электроникой, среди которой есть и системы приема передачи. Можно собрать что-то самостоятельно, но это уже вопрос к прямости рук и наличия соответствующих знаний. Иногда еще и вопрос времени. Из готовых модулей собрать собрать систему управления естественно проще и быстрее. Тут выбирайте сами.
Обычно, из всего многообразия передатчиков и приемников, я использую только 2 - это NRF24L01 на частоте 2,4 ГГц и простенькие передатчики на 433 МГц (тут наименований и маркировок великое множество). Обе эти частоты сейчас довольно забиты, но наши задачи довольно просты, поэтому для нас это несущественно.
Сегодня я буду говорить только про передатчики на частоте 433 МГц. Для передачи и обработки сигнала использую микроконтроллер Atmega 168/328 в виде платы Ардуино-нано (просто потому-что у меня их полно). Сразу отвечу на вопрос про программирование - нет, можно не уметь ничего программировать. Находите простенькую программу пульт-приемник, загружаете - профит. Если хотите что-то свое - придется вникнуть. Тут в принципе ничего сложного.
Перейдем к ТЗ. Мне требуется приемник совмещенный с драйвером моторов и дополнительными каналами управления чем-нибудь на модели (например сервомашинкой или фарами). Питание от 2-х LiOn банок типа 18650. Также хорошо бы предусмотреть использование обоих типов приемников-передатчиков (433 и NRF). Дальность передачи не особо важна, примерно 10-15 метров за глаза. Дальше, я просто потеряю модель из вида.
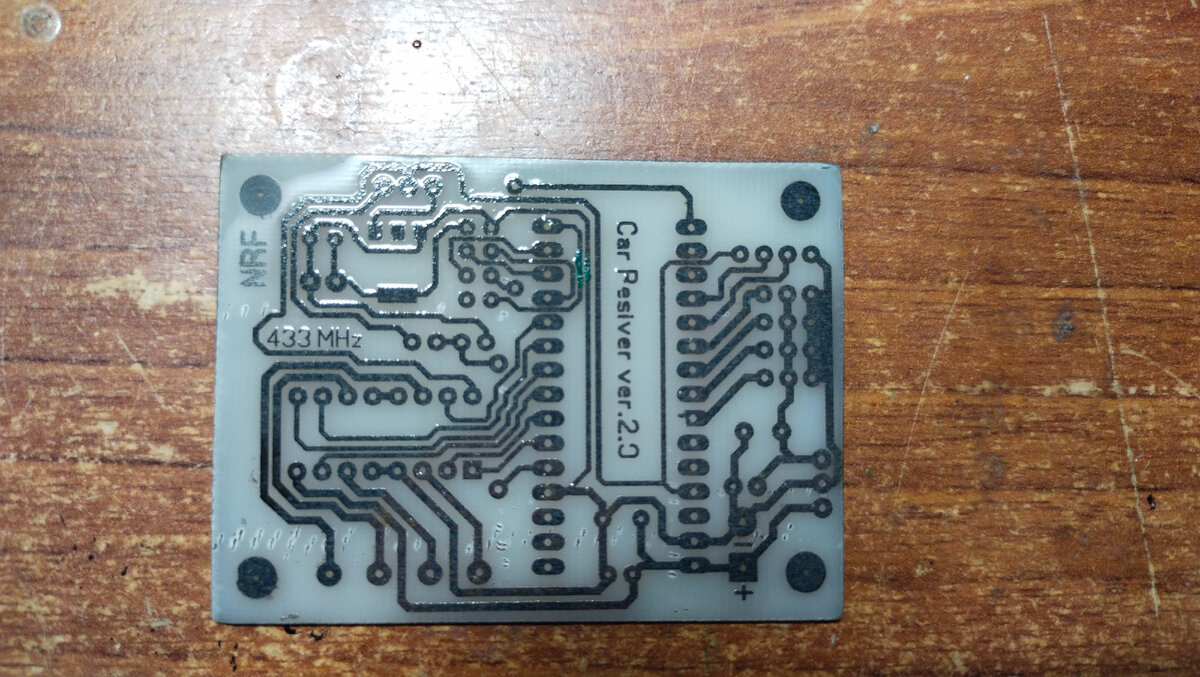
Результатом раздумий явилась следующая печатная плата.
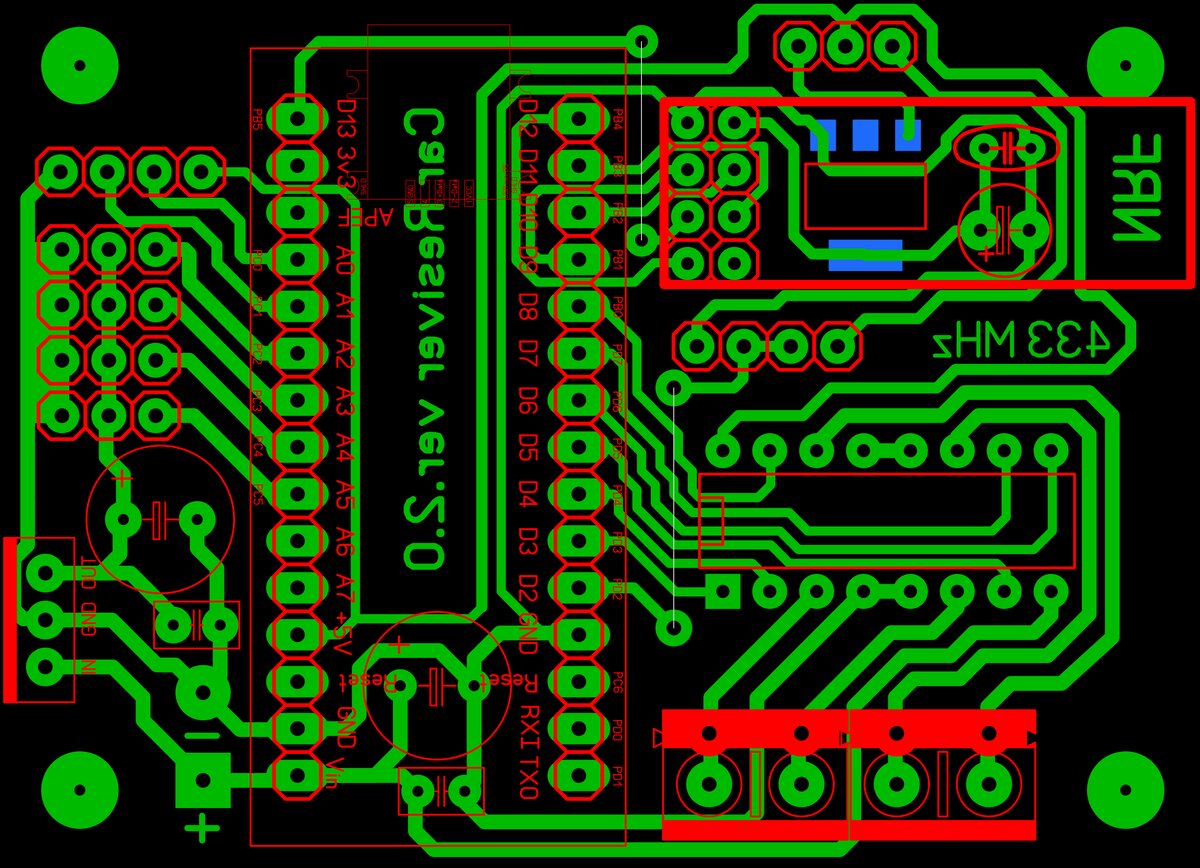
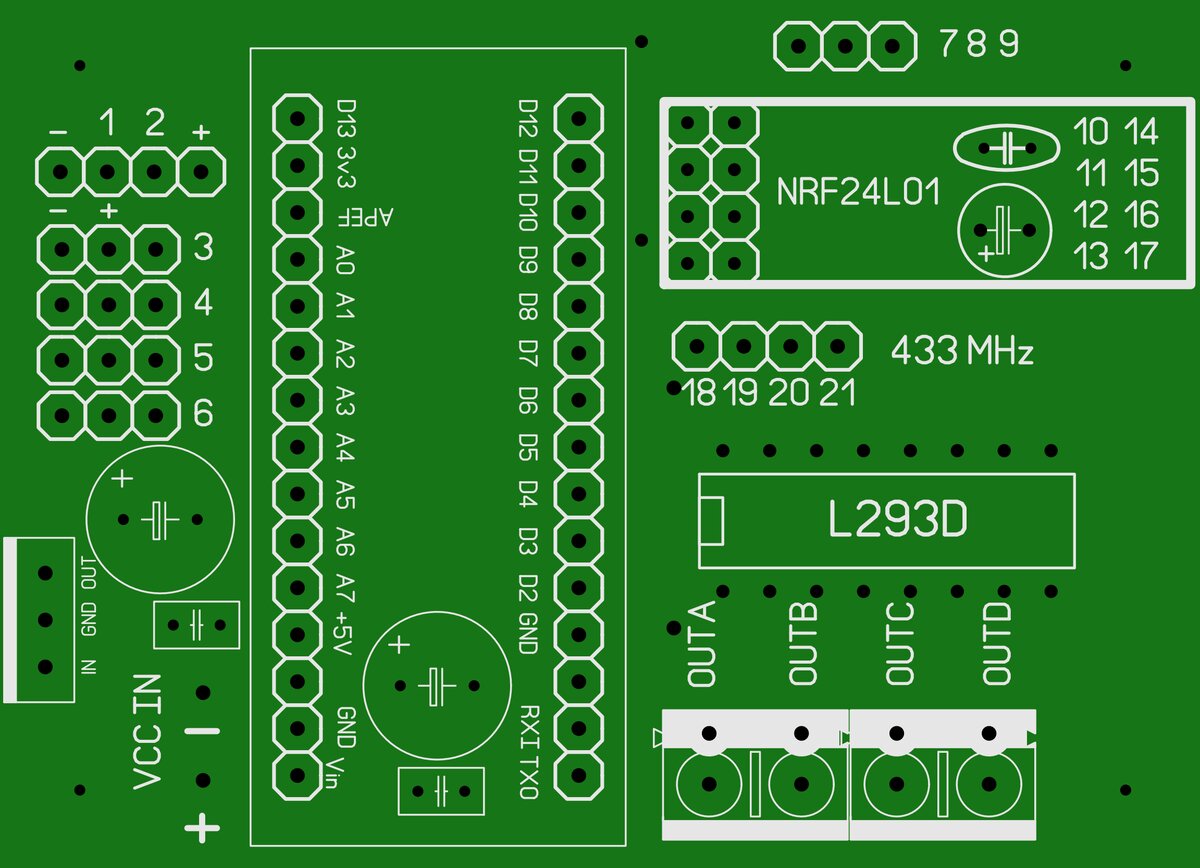
Для питания приемника и логической части драйвера двигателей, используется встроенный стабилизатор на 5 В Ардуино-нано. На колодки дополнительный устройств, питание идет со стабилизатора 7805. Там можно подключить более-менее прожорливые нагрузки, без вреда перезагрузить микроконтроллер.
Драйвер моторов использую L293N. Тоже потому-что они у меня есть. Выходы на моторы с клеммных колодок. Питание моторов идет напрямую с аккумуляторов. Если стало слабее ехать - заряжай батарейку). Предусмотрел место под стабилизатор 1117 на 3,3 В, для питания приемника NRF24L01.
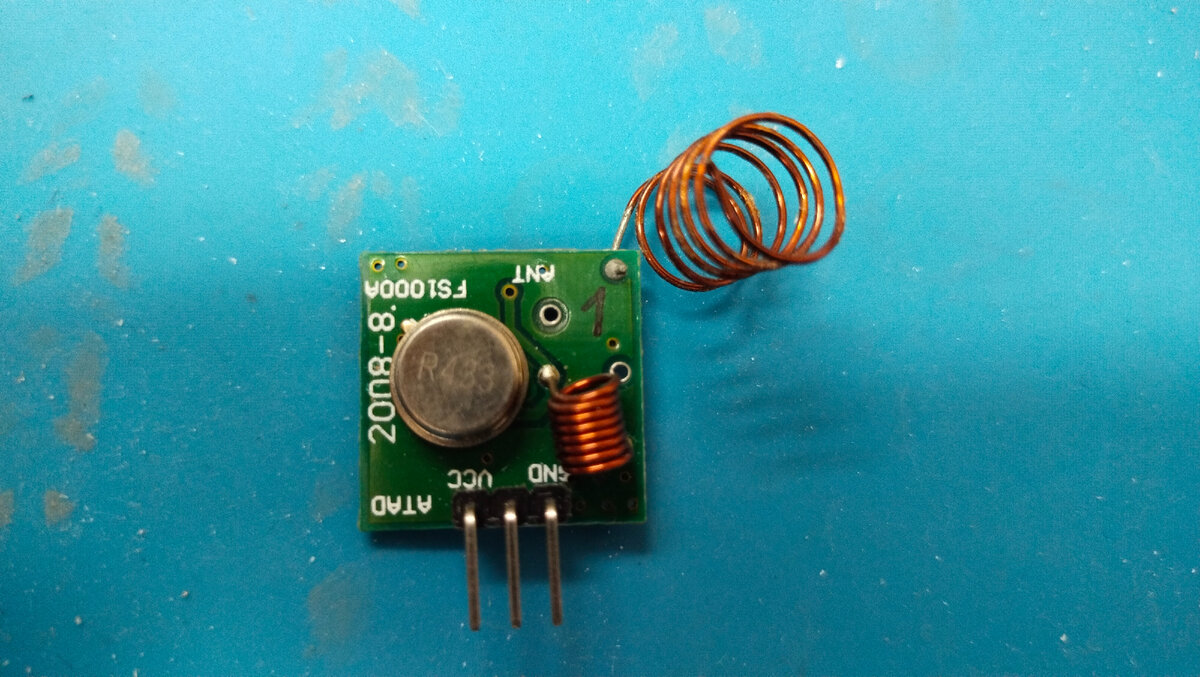
Давайте покажу какие приемники-передатчики на 433 МГц которые я использую.
№1 Передатчик FS1000A, антенна самопальная (кусок провода)
№2 передатчик с заводской антенной и кварцем. Маркировка микросхемы MX118.
№3 Приемник с подстроечной индуктивностью. Маркировка MX-RV-5V. Антенна самопальная.
№4 Приемник с маркировкой платы RX470C-V01 и кварцем 6.7458 (микросхема на приемнике затёрта).
Итак, по дальности приема-передачи - что с чем хорошо работает. Передатчик №1 и №2 работают с обоими приемниками, но лучший результат (около 30 метров) я получил с передатчиком №1 и приемником №4. Приемник № 3 с передатчиком № 1 работает очень неуверенно, дальность примерно метра 4-5. Связь очень неустойчивая. Моя рекомендация - брать только передатчик приемник под номером 2 и 4, с заводскими антеннами или №1 №4.
Данную плату можно лепить на любую машинку, получая при этом больший функционал и расширение возможностей модели. На фото моя самодельная модель для кружка.
Если у вас есть идеи по улучшению или упрощению системы радио управления моделями - пишите в комментарии.
P.S. Всех мужиков с наступающим праздником 23 февраля! Будьте!