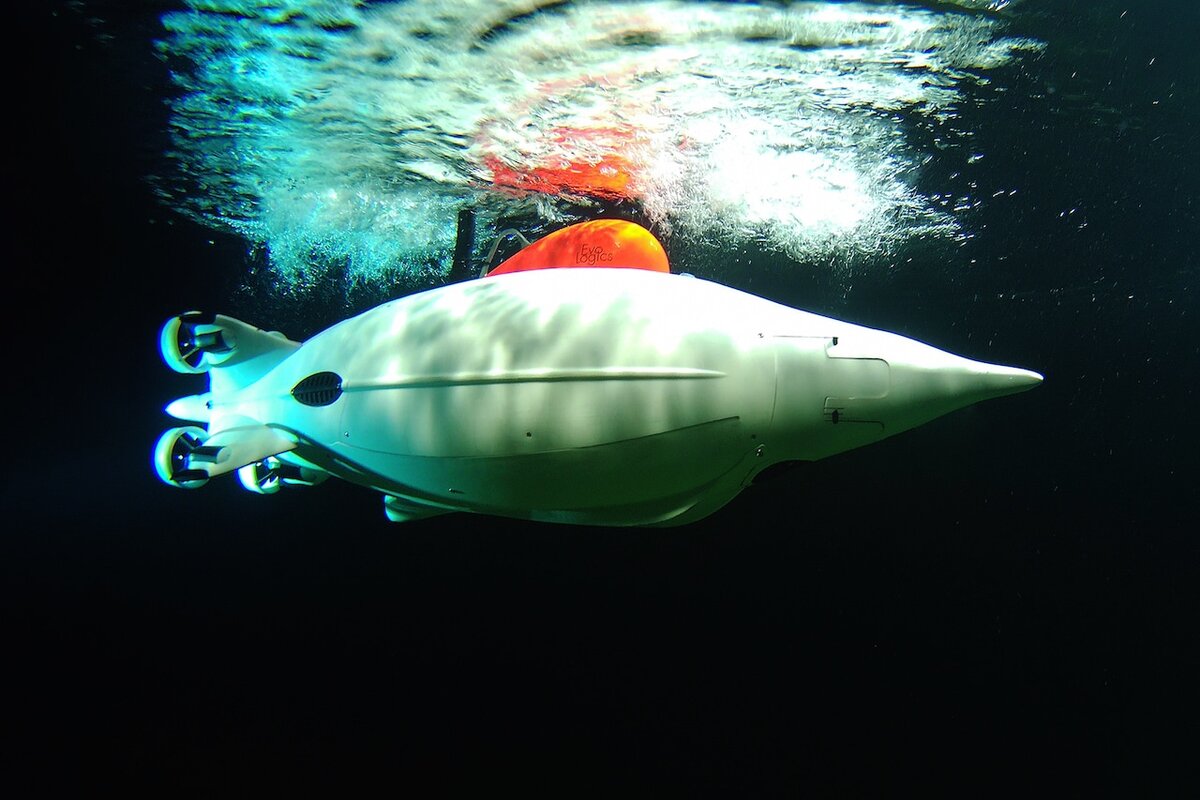
Фирма EvoLogics GmbH (Берлин, Германия) – участник разработки #необитаемого #подводного #аппарата (НПА) MUM (Modifiable Underwater Mothership) – разрабатывает #автономный НПА PinGuin в рамках подпроекта NaviMUM. Впервые НПА PinGuin был продемонстрирован в июне 2020 г. в г. Киел, Германия. Особенность НПА PinGuin – #пингвинообразные обводы корпуса. Многочисленные исследования и эксперименты в аэродинамической трубе и в опытовом бассейне показали, что веретенообразное (spindle-shaped) тело пингвина, обводы которого были оптимизированы в течение длительного естественного отбора, имеет уникально малое значение #гидродинамического #сопротивления.
При разработке проекта НПА PinGuin большое внимание уделялось достижению пингвинообразных обводов его корпуса и сведению к минимуму числа выступающих за пределы корпуса частей – всё это было направлено на получение минимального гидродинамического сопротивления. НПА PinGuin разрабатывается для использования в качестве подводного многофункционального узла связи, который будет работать в составе самокоординирующейся (self-coordinated) группы автономных НПА, выпускаемых с «материнского» НПА MUM, что позволит адаптировать сценарии позиционирования и связи для системы в целом.
Каждый из автономных НПА, входящих в состав группы, снабжён модемом USBL (Ultrashort Baseline – система #гидроакустического позиционирования с ультракороткой базой плотно расставленных гидроакустических датчиков) фирмы EvoLogics для передачи данных под водой и оценки своего местоположения. Каждый модем USBL будет оборудован встроенными атомными часами для точной синхронизации гидроакустической сети.
Модуль наземной связи НПА PinGuin оборудован двумя системами – беспроводной локальной сетью Wi-Fi и радиосвязью, а также оборудован аппаратурой средств навигационной системы GNSS (Global Navigation Satellite Systems) и единой складной антенной. В качестве опции возможно использование модема «Iridium» и цифровой мобильной сотовой связи GSM (Global System for Mobile communications). В состав пропульсивной системы НПА PinGuin входят четыре горизонтальные подруливающие устройства, установленные на X-образном кормовом оперении, и три вертикальные #подруливающие устройства. НПА способен зависать в толще воды в точке с заданными координатами.
Особенность архитектуры НПА PinGuin – наличие якорного устройства-треноги (anchoring tripod), с помощью которого НПА закрепляется на грунте на длительное время. Якорное устройство убирается в корпус заподлицо. Носовая оконечность НПА оборудована механизмом захвата для стыковки с другими подводными объектами.
Группа из нескольких НПА PinGuin формирует гибкую и адаптируемую подводную гидроакустическую сеть. Последовательный ряд НПА при зависании на глубине способен образовывать линию связи для передачи информации от мобильных или стационарных модулей системы MUM. Кроме того, НПА PinGuin может работать на поверхности воды для связи и передачи информации по сети Wi-Fi, радиосети или опциональной сети GSM на вспомогательное судно либо на береговую станцию, а также может выполнять географическую привязку других подводных объектов системы MUM, используя антенну системы GNSS и гидроакустический модем. При выполнении операций, требующих точного позиционирования в системе LBL (Long Baseline – система гидроакустического позиционирования с длинной базой), группа НПА PinGuin, используя якорное устройство, образует на грунте узлы этой системы; при этом отпадает необходимость демонтировать эти узлы с грунта после завершения работы, поскольку они являются самоходными НПА.
Основные функции НПА PinGuin (обеспечение хода в подводном положении, связь и позиционирование) были протестированы при испытаниях в бассейне и на открытой воде, а также в ходе демонстрации проекта MUM в г. Киел.
#кораблестроение



















