Сегодня прошли тестовые испытания системы управления электронным якорем. Ход работ по данному проекту я уже описывал в своих предыдущих статьях.
В целом: увы, - не удачно
Что не понравилось:
- нет информативности работы, - есть ли новые координаты, идет ли удержание, в каком режиме работает робот... не понятно (ранее эту информацию получал на ноутбуке, на улице же его нет и все стало грустно без информации)
- робот начал идти курсом 270 (на запад) при этом я прошел вместе с ним 50 метров и никаких изменений (что точка фиксации достигнута) не было
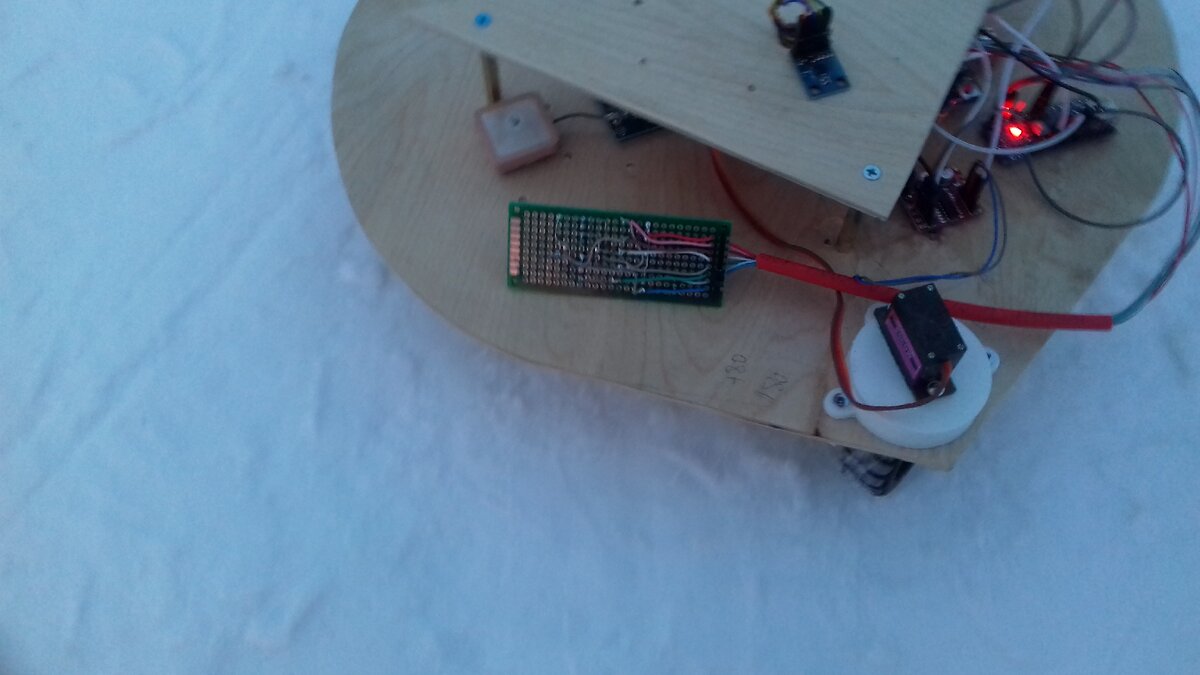
- робот со своим маленьким колесиком не едет по снегу ( пришлось его нести на руках
- GPS начал давать координаты минут через 10 после включения
Что выяснилось позже уже при "разборе полетов"
- в программе не было фиксации GPS-точки, и робот соотв. двигался на нулевую точку (Лондон, который действительно на 270 град западнее)
- погрешность получения данных от спутников сильно зависит от числа этих спутников над ним.
- в относительных координатах отклонение получается с погрешностью 2-3 метра. Привязка к координатам, указанным на карте Яндекс или Гугл - с погрешностью 100м. Из окна получается погрешность +/- 100 метров
Что было изменено при "разборе полетов" и ждет нового теста
- поправлена система информативности на светодиоде (теперь можно понять, есть ли фиксация GPS-координаты, в каком режиме работает)
- поправлена ошибка в программе с фиксацией GPS-точки (забыли про Лондон, удерживаем зафиксированную точку).
Дополнительно
Вероятно нужно будет делать индикатор, хотя бы двухстрочный для вывода текущей информации. Как-то без информации грустно, а светодида в наш век уже не достаточно, что бы сообщать о текущем режиме работы.
Ссылка на видео с тестированием
Всего наилучшего! Подписывайтесь на канал! Ожидайте новостей по ходу тестирования и готовности устройства.
Михалев СИ, руководитель конструкторского бюро и лабораторий детской робототехники