Здравствуйте, уважаемые читатели! В прошлой статье я рассказывал об ультразвуковом датчике HC-SR04 . Мы разбирали его характеристики, схему подключения к Ардуино и две библиотеки для работы с датчиком. Информацию об измеренном расстоянии выводилась в монитор порта. Сегодня поговорим о том, как выводить информацию c датчика на дисплей TM1637. Это позволит далее создать нам автономное устройство для измерения расстояния. Соберем схему на макетной плате, создадим скетч для работы HC-SR04 с дисплеем TM1637 и проведем небольшой тест точности датчика на малом расстоянии.
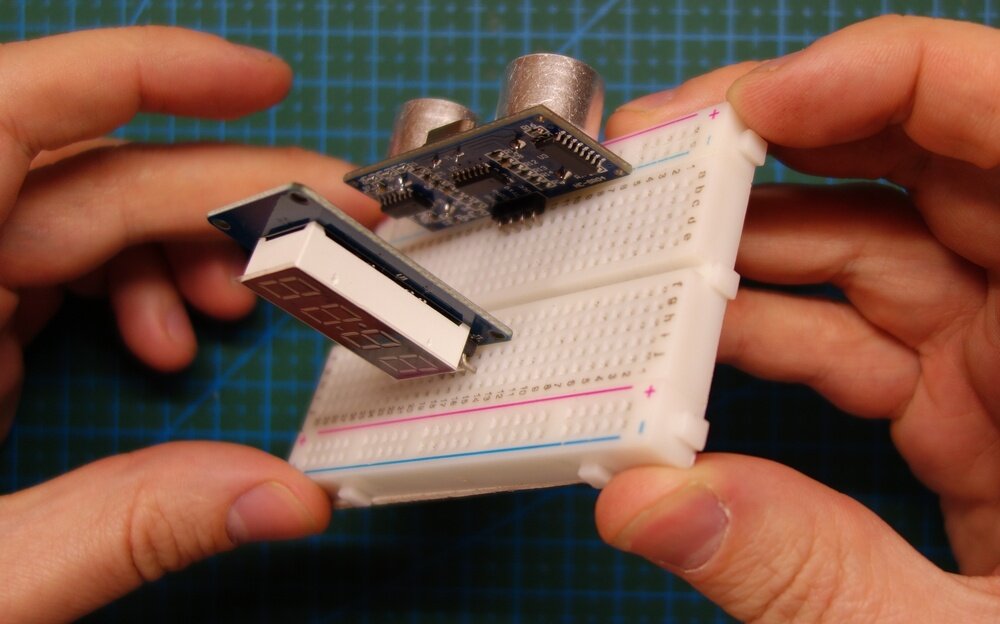
Но начнем с того, что в отличие от ультразвукового датчика HC-SR04, размещать светодиодный индикатор TM1637 на макетной плате не так-то и удобно.
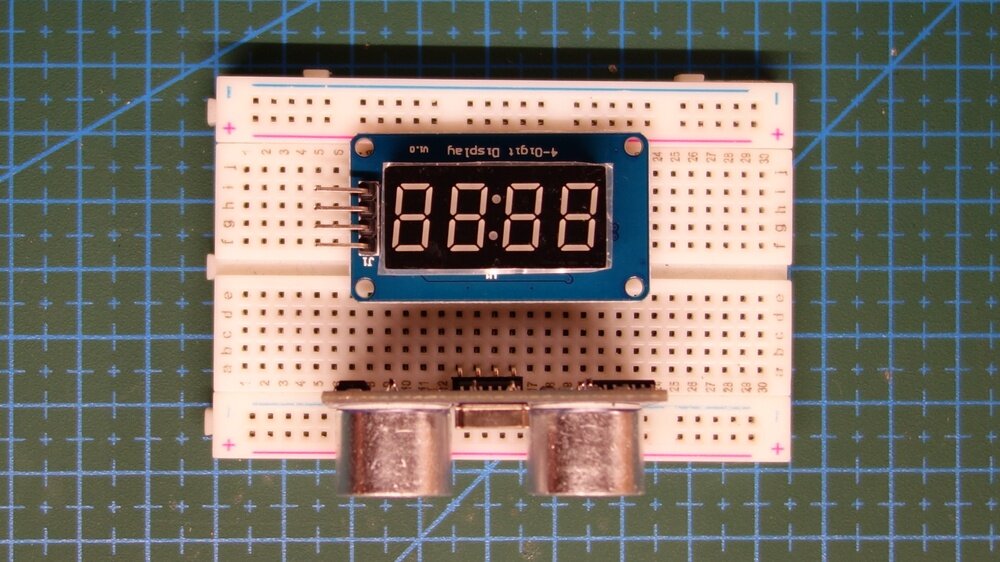
А хотелось бы, чтобы светодиодный индикатор, размещался на макетной плате, как это показано на фото ниже:
Даже если мы выпаяем гребенку контактов, выпрямим контакты и припаяем снизу, то всё равно будет не так эстетично, как хотелось бы.
Поэтому хочу предложить другой вариант. Нужно взять четырехпиновое однорядное гнездо с длинными контактами. Они часто идут в комплекте разных наборов и продаются отдельно. Можно отделить нужное количество пинов от гнезда большего размера.
Далее, вставляем выводы датчика в данное гнездо.
И загибаем ножки гнезда. Каждую следующую примерно на 2 мм дальше от основания гнезда.
Если посмотреть сбоку, получается вот такой результат.
В таком виде гнездо прекрасно размещается и удерживается на макетной плате.
И можно подключать дисплей TM1637 и ультразвуковой датчик HC-SR04 к Ардуино по следующей схеме:
На макетной плате получается вот такой результат:
Скетч для работы HC-SR04 с дисплеем TM1637
Для создания скетча для работы HC-SR04 с дисплеем TM1637, объединим скетчи из двух моих прошлых статей «Дисплей TM1637. Скетч, библиотека, схема подключения к Ардуино» и «Ультразвуковой датчик HC-SR04 для измерения расстояния. Подключение к Ардуино ». В качестве библиотеки для работы с ультразвуковым датчиком, выберем библиотеку Ultrasonic и укажем пины Arduino UNO к которым у нас подключен датчик и дисплей. Задержку на считывание установим один раз в секунду. Но можно ее и уменьшать до 50 мс (29 мс минимальное время, которое необходимо датчику, чтобы сгенерировать ультразвуковой импульс, принять отраженный сигнал, рассчитать расстояние и передать информацию микроконтроллеру).
Загружаем скетч в Ардуино. И видим измеренное датчиком значение до ближайшей стены, выведенное на светодиодный индикатор.
Т.к. у коврика есть сантиметровая разметка и по бокам цифрами отмечены сантиметры, то очень легко провести тест точности датчика на малой дистанции.
Размещаем датчик на линии 10 см и постепенно, по сантиметру, придвигаем кусок картона к датчику.
Видно, что датчик достаточно точно определяет дистанцию. Минимальная дистанция обнаружения препятствия составляет 3-4 см.
А вот в завтрашней статье мы проведем эксперимент на природе и определим точность измерения датчика HC-SR04 на различных расстояниях, при использовании двух самых популярных для работы с датчиком библиотек: Ultrasonic и NewPing . А так же определим максимальную дальность действия датчика HC-SR04.
Ссылка на скетч из статьи - https://yadi.sk/d/h5FbKMSWEattDw
Продолжение >>> Испытание датчика HC-SR04 на дальность.
_________________________________________________________
Спасибо, что дочитали до конца! Если статья понравилась, нажмите, пожалуйста, соответствующую кнопку. Если интересна тематика электроники и различных электронных самоделок, подписывайтесь на канал. До встречи в новых статьях!