лазерные стабилизационные системы могут использоваться для нейтрализации или коррекции изменений в оптическом режиме, вызванных внешними колебаниями или другими факторами, которые играют важную роль в формировании изображений, оптической связи и других прикладных технологиях. наиболее распространенным методом является использование электрического контура обратной связи, например типа PI или PID. электрооптический модулятор может использоваться для управления мощностью, а диапазон полосы сервосистемы очень высок. рациональное проектирование цепей обратной связи очень важно для обеспечения эффективного подавления шума в широком диапазоне частот.
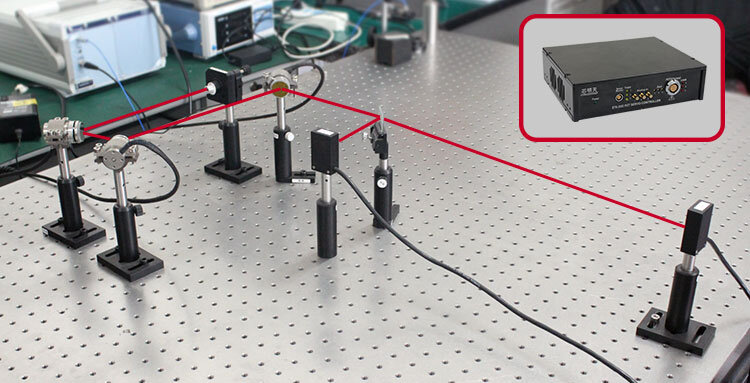
установить лазерную стабилизацию первого и второго порядка. лазерная стабилизирующая система представляет собой систему стабилизации отклонения лазерного луча под давлением и использует внешний детектор положения PSD для закрытия контура. установить координаты места назначения для получения луча. источник света приходит к детектору положения PSD после подавления электрических наклонных платформ и компенсации отражения. интерференционный пьезоэлектрический наклон используется для моделирования внешнего вмешательства.
можно выбрать подходящую систему в зависимости от источника света. лазерная стабилизирующая система первого порядка предназначена для определения местоположения, а лазерная стабилизация второго порядка - для ориентации. например, параллельный свет можно стабилизировать с помощью лазерной системы первого порядка. Однако из - за отклонения места расположения точечного источника света возникла необходимость в дополнительной коррекции положения, которая потребовала бы корректировки второй лазерной стабилизирующей системы. обе системы имеют следующую структуру.
компенсировать отклонение луча?
замкнутый процесс управления
в лазерной системе стабилизации управление замкнутым контуром осуществляется в сочетании с электрическим контроллером напряжения CoreMorow и модулем внешнего детектора положения PSD.
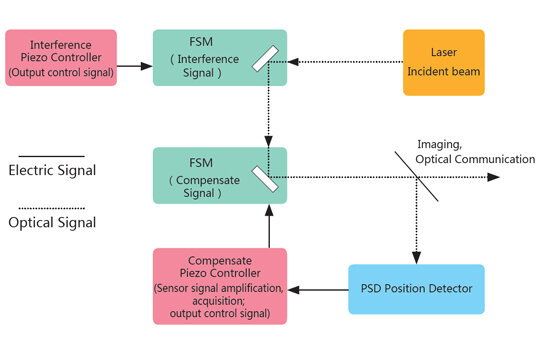
На рисунке показан процесс замкнутого управления лазерной системой стабилизации. Помимо внешнего детектора положения PSD и сигналов контроля цели от 0 до 10 V, остальными частями являются пьезоэлектрический наклонный пульт и система пьезоэлектрических контроллеров CoreMorow.
В этой системе уровень пьезоэлектрического наклона является приводом, который контролирует направление отклонения зеркальной линзы, то есть направление оптического пути. пьезоэлектрический регулятор - источник замкнутого управления и напряжения. Функции пьезоэлектрического контроллера показаны в зеленой рамке слева.
система стабилизации лазера имеет два важных сигнала, а именно: управляющий сигнал и сигнал обратной связи, которые обрабатываются в сервомоторных модулях (включая сравнение и адаптацию). после обработки сигнала выводится через приводной модуль для увеличения мощности (включая усиление напряжения и тока) и добавляется к уровню пьезоэлектрического наклона, что позволяет вести электрический наклонный стол к отклонению. В то же время отклонение пьезоэлектрической наклонной платформы изменило световую трассу, и соответственно ответный сигнал датчика PSD был изменен. сигнал обратной связи собирается, обрабатывается и вводится в модуль сервопривода, который сопоставляется с сигналом цели. регулировать сигнал по разнице. затем регулировка выходного напряжения контрольным сигналом приводит к изменению напряжения, наложенного на пьезоэлектрический наклонный стол, что меняет поворот пьезоэлектрической наклонной платформы и оптический путь... продолжение следующего цикла, по аналогии, стабилизирует конечное положение лазера в целевом положении.
функция пьезоэлектрического контроллера
принцип замкнутости системы стабилизации лазера может быть подробно разъяснен с помощью функций пьезоэлектрического контроллера, о чем говорится ниже:
1)усиление мощности
напряжение привода пьезоэлектрического наклона обычно составляет от 0 до 120V или 150V, тогда как входное напряжение обычно меньше, например от 0 до 10V или от 0 до 5V, поэтому для выполнения требований, предъявляемых пьезоэлектрическим приводом, требуется усиление управления входом напряжения. усиление мощности через пьезоэлектрический контроллер увеличит и выводит вводимый аналоговый сигнал управления целью.
Примечание: контрольные сигналы цели обычно от 0 до 10V, также могут быть установлены в других диапазонах, пожалуйста, убедитесь в покупке с вашим менеджером по продажам.
2) сбор, обработка и сравнение сенсорных сигналов
ПСД - детектор получает световые сигналы мощности, которые изменяются в зависимости от того, как отклоняется пьезоэлектрический уровень. пьезоэлектрический контроллер будет собирать, обрабатывать и сопоставлять сигналы напряжения, возвращаемые детектором положения PSD, и соответствующим образом регулировать сигналы отклонения и увеличивать выход до уровня пьезоэлектрического наклона, изменяя тем самым направление отклонения пьезоэлектрической скафандра.
выше описан общий процесс лазерной стабилизации CoreMorow. детектор положения PSD может в реальном времени обнаруживать пятна света в лучах и давать обратную связь контроллеру с компенсацией давления. компенсационный пьезоэлектрический контроллер может собирать, обрабатывать и увеличивать сенсорные сигналы, поступающие от датчиков позиционного детектора PSD, и выводить соответствующие компенсирующие сигналы контрольного напряжения на уровень компенсации пьезоэлектрического падения. затем компенсированный пьезоэлектрический наклонный стол быстро приспосабливается к углу в соответствии с компенсацией сигналов контрольного напряжения, что позволяет точно и полностью получать световые сигналы для достижения цели формирования изображения или оптической связи.
различие между встроенными датчиками пьезоэлектрического наклона и внешним замкнутым кольцом PSD
по сравнению с замкнутой пьезоэлектрической платформой наклона встроенных датчиков открытая кольцевая пьезоэлектрическая платформа имеет более быстрый отклик и более высокое разрешение, поэтому внешний детектор положения PSD может повысить скорость регулирования луча. Кроме того, PSD может непосредственно измерять положение световых точек, что является прямой реакцией на отклонение луча. замкнутая версия пьезоэлектрической наклонной платформы с встроенными датчиками характеризуется линейной связью между регулированием напряжения и углом отклонения, что обеспечивает соответствие фактического угла отклонения пьезоэлектрической скамьи предполагаемой регулировке управления углом отклонения. отслеживать и стабилизировать луч можно с помощью монитора компьютера.
В этой системе, когда открывается компенсационный пьезоэлектрический наклонный стол, детектор положения показывает эффект, показанный слева от рисунка ниже. расхождение между точками света и позицией цели; после начала фазы компенсации пьезоэлектрического наклона из программного обеспечения видно, что световая точка стабилизируется в заранее определенном целевом положении, как показано на рисунке ниже.
Выводы
компенсационное управление системой электрического отклонения от давления делает передачу света более точной и стабильной. одним из наиболее важных факторов является то, что пьезоэлектрический наклонный стол имеет сверхвысокую точность отклонения и высокую скорость отклонения. пьезоэлектрический наклонный пульт CoreMorow P33.T2K и пьезоэлектрический контроллер E70.D3S обеспечивают точность отклонения от уровня нанокарда и скорость реакции на отклонение до миллисекунд или даже субмиллисекунд, что играет решающую роль в процессе стабилизации лазера.



















