Сегодня, 7 февраля, отмечается Всемирный день робототехники — одной из самых прикладных областей науки. Чтобы создавать беспилотных, мобильных, промышленных и коллаборативных роботов, недостаточно лишь инженерного образования и навыков программирования. Необходимо разбираться в системах восприятия (планирование пути, навигация), искусственном интеллекте, виртуальной реальности, хаптике (технологии, имитирующие тактильные ощущения) и разнообразных умных датчиках.
Мы пообщались с командой Лаборатории интеллектуальной космической робототехники и Научной группой Динамических систем искусственного интеллекта Центра системного проектирования Сколтеха, чтобы рассказать вам, над какими робототехническими проектами работают сейчас учёные в России и какие технологии они применяют.
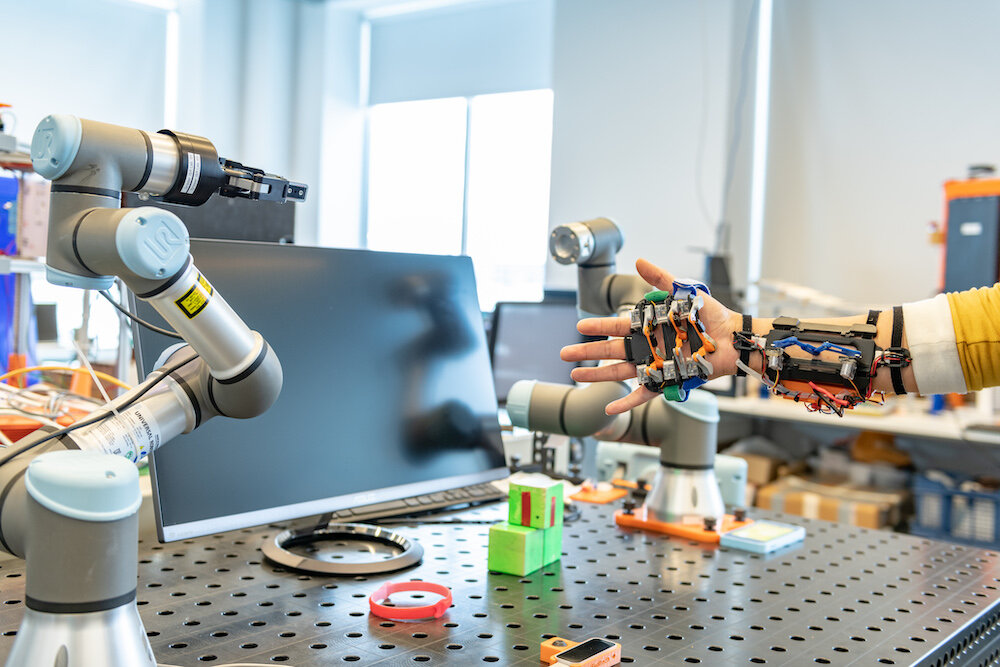
DeltaFinger. Тактильное устройство, которое крепится на руку и позволяет человеку в VR-шлеме физически почувствовать на кончике пальца виртуальную реальность. Будет полезно медикам во время виртуальной операции или спасателям для удалённой работы в районах техногенных или природных катастроф.
Робот-дезинфектор UltraBot 2.0. Рестайлинговая версия робота, который с помощью концентрированного ультрафиолетового света уничтожает вирусы в помещениях, работает автономно и, в отличие от аналогов, умеет объезжать даже движущиеся препятствия и точно позиционироваться на больших расстояниях. Для робота компания ИнЭнерджи разработала специальные топливные элементы, которые повышают его эффективность. По словам создателей, в версии 2.0 будет улучшена система навигации, усилен и обновлён корпус, что поможет снизить стоимость робота.
Морфогенетический мультироторный беспилотный летательный аппарат. DroneGear способен приземляться на неровную или подвижную поверхность и спокойно перемещаться по ней. Беспилотник сможет инспектировать линии электропередач и вышек сотовой связи, заряжать роботов в воздухе и на земле, доставлять грузы, а также выполнять высотные работы.

Система автономного полёта и компьютерного зрения для беспилотных летательных аппаратов. Программное обеспечение CyberDrone, интегрированное с системой компьютерного зрения, позволяет аппаратам летать в полном автономном режиме и инспектировать промышленные и инфраструктурные сооружения, обеспечивать безопасность режимных объектов и соблюдение пожарной безопасности.
Четвероногая робот-собака HyperDog. Робот сконструирован из углеродного волокна и деталей, напечатанных на 3D-принтере, и представляет собой платформу с открытым исходным кодом для разработки программного обеспечения для четвероногих роботов. С помощью этой платформы исследователи и инженеры получают способ разработки роботов для тестирования разных алгоритмов в компьютерной симуляции или реальной среде. Например, в прошлом году на международной конференции IEEE по автотранспортным технологиям в Хельсинки учёные презентовали систему, с помощью которой робот точно определяет тип текстуры поверхности под своими ногами, что помогает улучшать его проходимость и навигацию на незнакомой местности.
Беспилотный автомобиль Self.AI. Совместный проект Сколтеха, МФТИ и компании Интегрант. Робот перемещается по дорогам территории Инновационного Центра Сколково, распознаёт препятствия и планирует траекторию в автономном режиме. На этой машине в Лаборатории космической робототехники Сколтеха тестируют технологию DarkSLAM, позволяющую беспилотному транспорту работать при плохом освещении, используя только камеру и NFOMP — новый метод планирования движения робота на основе нейронных полей.
Мобильная роботизированная платформа для мониторинга теплиц. Greenhouse robot будет работать между рядами растений. Анализируя данные с шести камер, он отслеживает количество, общую массу и степень зрелости урожая в реальном времени. Робот сделан из алюминиевых сплавов и лёгких композитных пластин и передвигается по бетонному полу или по рельсам. У платформы четыре двигателя, которые питаются от бортовых аккумуляторов. Заряда хватает на 12 часов.
Разрабатывать таких сложных роботов учат в магистратуре Сколтеха «Инженерные системы». Подробнее о программе можно узнать здесь.