Продолжаем знакомство с техникой на уровне математических возможностей моделирования.
Как я уже говорил основа любой устойчивой системы - это грамотное построение функции управления. Сколько непонятных, но в тоже время нужных слов, но на самом деле всё просто.
Я думаю все вы ездили на авто (глупость сказал, но всё же) и обращали внимания, что до одной и той же скорости Вы можете разогнаться за разное время.
1. Сценарий один. Берем и топим газ в пол, пока обороты не взлетят до 7000, дальше можно уже на третью скорость и снова в пол.
2. Сценарий два. Берем за основу 5000 оборотов и действуем по первомуе сценарию, Время переключения будет другим и эффект тоже.
3. Сценарий три. Машина еще на обкатке, поэтому мы её будем беречь и разгонять до 2500 оборотов и дальше переключаться.
4. Сценарий четыре. У меня автоматическая коробка передач и я вообще не знаю что такое тахометр.
Как видите, педалька у нас одна, а сколько сценариев с помощью неё может быть. И это еще не всё.
А теперь разберем в чем тут разница.
У каждого режима есть свои плюсы и минусы. Один будет иметь самый быстрый разгон, другой меньше всего расходует топлива, третий сбалансирует нагрузку на коробку передач.
Но самое главное то, что вы нажимая на педальку не думаете о том, сколько сейчас нужно впрыснуть топлива и не обращаете внимания на массу машины, наличие ветра или уклон дороги.
За вас всё это делает автоматика регулирования. Сядьте на велосипед и попробуйте разные режимы, через мышцы вы прочувствуете разницу, Только регулированием в случае с велосипедом будет заниматься наш мозг, который отлично умеет управлять Вашим телом. Вы даже не представляете на сколько он виртуозен.
Итак, сегодня мы познакомимся с П - регулятором или просто пропорциональным регулятором.
В принципе он работает достаточно просто (ага, особенно если до этого знал про него, скажете Вы).
Задача любого регулятора доставить систему в нужную точку по параметру. Например нужно вскипятить чайник (нагреть до 100 градусов) или держать заданную скорость.
Как работает обычный нагрев (у большинства чайников) он включился и при достижении нужной температуры сработает термоконтакт, который прекратит подачу питания. Как вы понимаете в данном случае идёт управление нагревом, но ни о каком регулировании речи нет. Так как по факту, температура на дне чайника может быть и 105 или наоборот ниже - 98 градусов.
А теперь рассмотрим тот же чайник, но с регулятором по температуре и задаем 95 градусов(хотя можем и 100). Так вот, регулятор будет работать по такой схеме. Наша текущая температура 35, необходимо нагреть на 60 градусов. Значим подаем 600Вт мощности(это просто для примера). Через несколько секунд температура пошла вверх и стала 50 градусов.
Отлично, регулятор на верном пути, но он будет подавать не 600, а 450 Вт уже. Итак по мере приближения к нашей точке в 95 градусов. Регулятор будет снижать мощность. В итоге при 94 градусах он будет подавать всего 10Вт.
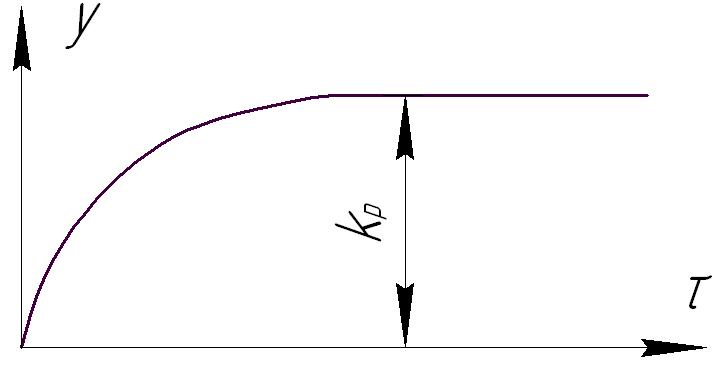
По горизонтали у нас время, по вертикали регулируемый параметр (в нашем случае температура). Как вы уже поняли, наше воздействие было прямо пропорционально разнице между текущей температурой и заданной (уставкой)
Но тут есть еще один нюанс, как вы могли догадаться, после того как мы достигли заданного значения, чайник отключится и начнет остывать (это логично, так как температура окружающей среды ниже заданной). Получится мы постоянно будем включать и выключать систему, это не совсем хорошо. Правильнее было бы к пропорциональной составляющей добавить небольшое смещение
Тогда формула регулирования приняла бы вид y=Kpx +b. но это b - подойдёт для 95 градусов. Для 50 градусов уставки необходимо меньше энергии, чтобы поддерживать её на 50. То есть коэффициент b имеет место быть, но далеко не всегда.
Итак, когда примерно с чайником всё понятно мы запускаем регуляцию в полной мере. А именно нам надо нагреть чайник до 75 градусов. Система работает и чайник греется. Но я в любой момент могу поменять уставку с 50 на 65. А затем через 5 минут, вообще поставить на заданную температуру на 45 градусов.
Как вы понимаете задача регулятора максимально быстро и точно достигнуть заданной температуры.
Если сравнивать П - регулятор с другими видами, то он самый простой и понятный, но имеет наибольшее время регулирования (достижения заданной точки).
Если честно, то семейство ПИД регуляторов далеко не самые основные. Полно других различных решений и разного порядка.
Но не будем о грустном. Сегодня мы познакомились с П(пропорциональным) регулированием. Кстати если вдруг мы перегреем чайник, то в идеале, регулятор бы стал охлаждать его до заданной температуры. У нас же идёт умножение на разницу температур, а она станет отрицательной. Но не везде у регулятора есть устройства для охлаждения.
На сегодня достаточно. В будущем создадим собственный П-регулятор на ардуино.
Если Вам понравилась публикация, оставляйте комментарии и пишите вопросы. Затем я отвечу добавлением видеоролика в данной статье.
Кроме того Вам могут быть полезны статьи:
🔹 Словарь терминов электроники.
Если информация оказалось знакомой, то можешь пройти Небольшой тест на знание азов электроники.
Хочешь узнавать быстрее и больше заполни опросный лист обратной связи,
-----------------------------------------------------------------------------------------------
Полезные ссылки:
🔹 ГИД АРДУИНО
-----------------------------------------------------------------------------------------------
Ставьте в закладки эту публикацию, а так же подписывайтесь в группу
🔹 Вконтакте и 🔹 Телеграм-канал.
------------------------------------------------------------------------------------------------