Марс Ровер полоса препятствий
Земля на Марс: используйте программирование для перемещения по другой комнате - не ступая в нее!
Введение
Как ученые и инженеры управляют роботами, которые движутся вокруг других планет за миллионы миль? Это не так просто, как водить игрушечный автомобиль с дистанционным управлением здесь, на Земле. В этом упражнении вы столкнетесь с некоторыми трудностями, с которыми сталкиваетесь за рулем «робота», которого не видите!
Фон
США высадили на Марсе четыре роботизированных ровера: Sojourner в 1997 году, Spirit и Opportunity в 2004 году и Curiosity в 2012 году. Эти роверы получили все большую автономию, что означает, что они могут самостоятельно принимать решения о том, как объезжать препятствия. Они делают это с помощью встроенных датчиков (таких как камеры и лазеры), которые могут обнаруживать препятствия и компьютеры для интерпретации того, что они видят. Ученым на Земле, однако, все еще нужно послать команды роверов о том, куда идти. Сначала вы можете подумать, что это похоже на вождение автомобиля с дистанционным управлением, но есть проблема: Марс очень далеко от Земли. Это так далеко, что даже скорость света не достаточно высока для команд, чтобы добраться туда без задержки. В зависимости от того, где планеты вращаются вокруг Солнца, может потребоваться от восьми до двадцати минут, чтобы сигнал достиг Марса с Земли. Это означает, что до 40 минут в оба конца можно отправить команду роверу и получить ответ! Можете ли вы представить себе игру в видеоигру, если вам пришлось ждать 40 минут, чтобы увидеть, что происходит каждый раз, когда вы нажимаете кнопку на контроллере?
Из-за этой задержки, когда ученые едут на ровере, им нужно загрузить сразу несколько команд, чтобы убедиться, что ровер не разбился. Это требует тщательного планирования пути заранее. В этом упражнении вы будете работать с двумя добровольцами, чтобы смоделировать отправку команд между оператором и ровером, а также выяснить некоторые проблемы и решения.
Материалы
- Два волонтера
- Две смежные комнаты
- Крупные предметы, служащие препятствием, такие как мебель или ящики
- Бумага и карандаш
- Два смартфона или планшета с возможностью видеочата (опционально)
Подготовка
Один из ваших добровольцев будет ходить с закрытыми глазами в этом упражнении. Удалите любые потенциально опасные препятствия из одной из комнат, такие как острые предметы или электрические шнуры, по которым они могут споткнуться.
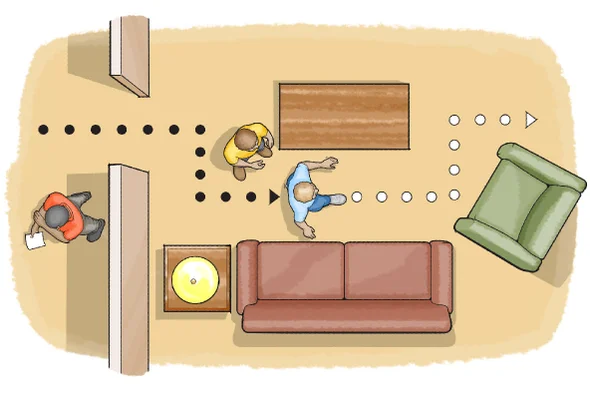
Спланируйте путь через эту комнату самостоятельно, от начальной точки до конечной точки.Например, если в комнате две двери и стол посередине, спланируйте, как пройти от одной двери к столу и к другой двери. Запишите точные инструкции для следования по этому пути. Дайте каждой команде номер. Например, «1) сделать один шаг вперед. 2) повернуть направо. 3) сделать два шага вперед. 4) повернуть налево…».
Вы будете ровером "оператором". Назначьте роли двум вашим добровольцам. Один из них будет «ровером», а другой - «посланником».
Процедура
Поместите «ровер» в начальную точку первой комнаты. Этот человек теперь должен закрыть глаза и держать их закрытыми. Не подглядывать!
Войдите в другую комнату с посланником. Убедитесь, что вы не видите ровер.
Прошепчи свою первую команду посланнику. Убедитесь, что вы достаточно тихо, чтобы ровер не слышал вас.
Курьер должен идти (не бежать) в другую комнату и передать команду роверу. Марсоход должен точно следовать этой команде, но он должен быть очень осторожным, чтобы идти очень медленно (чтобы избежать защемления пальцев или голеней). Курьер должен оставаться в комнате с ровером, пока ровер движется.
После этого мессенджер должен вернуться к вам, чтобы получить следующую команду и повторить процесс. Вы не можете изменять команды - придерживайтесь того, что записали!
Продолжайте посылать команды по одной, пока ровер не достигнет конечного местоположения или пока он не «рухнет» (например, столкнувшись с предметом мебели или стеной).
Если ваш ровер добрался до финиша, поздравляю! Теперь вы можете поменяться ролями или попытаться добавить больше препятствий, чтобы сделать путь длиннее или сложнее. Насколько сложно вы можете проложить путь до того, как ваш ровер рухнет?
Если ваш ровер разбился, не волнуйтесь! Поговорите со своими добровольцами, чтобы попытаться выяснить, что пошло не так. Например, возможно, ваши шаги не одного размера. В этом случае вам может понадобиться изменить ваши указания: «Делай большие шаги» или «Делай маленькие шаги», а затем повторите попытку. Сколько попыток нужно, чтобы ваш ровер от начала до конца не разбился?
Дополнительно: если у вас есть два телефона или планшета с приложением для видеочата, попросите добровольца-ровера держать его, чтобы вы могли видеть то, что перед ними (при этом не закрывая глаза). Теперь вы можете видеть то, что видит ровер. Вместо того, чтобы записывать все свои команды заранее, выполняйте их по одной в зависимости от того, что вы видите в видеочате. В дополнение к командам перемещения вы также можете выдавать команды для управления камерой, например «направить камеру вниз»."Это делает навигацию легче или сложнее?
Наблюдения и результаты
Сначала вы можете найти это занятие на удивление трудным! Может быть соблазнительно обмануть и изменить ваши команды на полпути, или роверу захочется открыть глаза. Вы можете столкнуться с проблемами, такими как шаги ровера больше или меньше, чем у вас, или ровер не делает ровных поворотов на 90 градусов. Важно «откалибровать» движения ровера, чтобы получить ожидаемые результаты при вводе команд. Та же концепция применима и к настоящим марсоходам: чтобы тщательно спланировать путь, ученым необходимо точно знать, как далеко они будут двигаться или поворачивать при подаче команды.