Сегодня мы сделаем забавного робочервя.
Как всегда многие проекты из статей выполняются с помощью конструктора MRT EXCITING, купленного в магазине "Робот и Я". Придёт время и сделаем на него отдельный обзор.
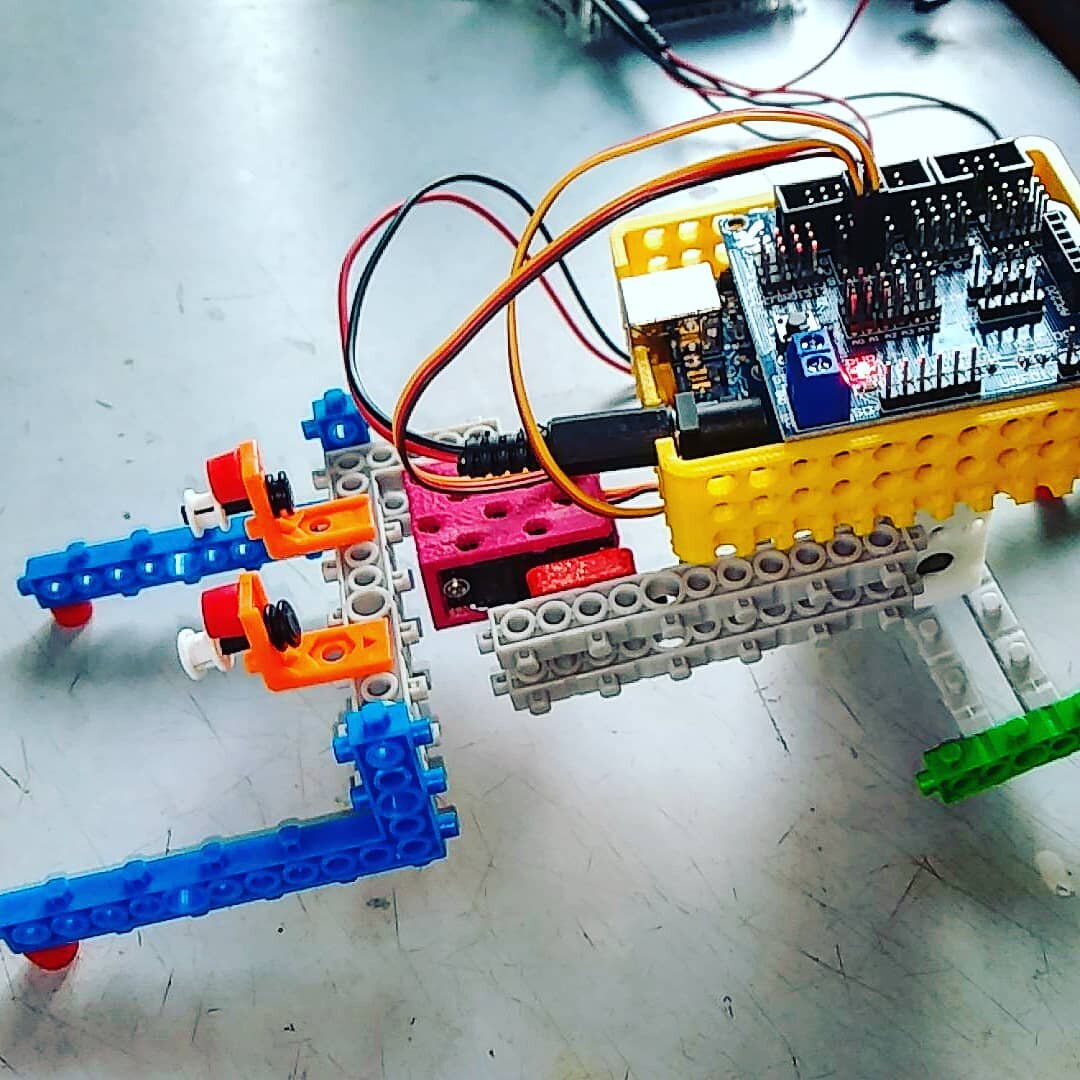
Конструктор этот хорош тем, что очень легко дорабатывается установкой в него дополнительных неоригинальных модулей.
Деталей потребуется не так много, нужно только добавить сервоприводы в корпусе и удлинительные провода для подключения.
Подвижный робот.
В следующих уроках шаг за шагом мы изучим очень много различных способов передвижения без участия колёс и гусениц. Это очень интересная тема, захватившая меня много лет назад.
Самое интересное, что задумываясь о подвижном роботе, многие представляют себе именно сложные человекоподобные машины, со сложнейшей кинематикой.
Решение такой задачи потребует весьма дорогого оборудования, а расчеты положения всех сервоприводов будут потреблять огромные вычислительные ресурсы. Пример того - известный американский робот, в который вложены огромные деньги и отличная команда разработчиков трудилась над его совершенствованием почти десятилетие.
Мы же пойдем шаг за шагом от самых простых к всё более и более сложным.
Алгоритм движения
Сколько сервоприводов понадобится, что бы совершить любое постапутельное движение?
Одного будет явно недостаточно, он обеспечит только изгиб механизма, а движение вперёд придется обеспечивать по принципу храповго механизма. А это перемещение части "тела" нужно закрепить.
Для примера возьмём червяка.
Как он смог бы передвигаться? Модель нашего червяка будет двигаться используя силу тяжести и силу трения.
Пластиковые детали очень хорошо скользят по столу, А резиновые - цепляются и плохо проскальзывают.
Можно описать фазы движения псевдографической диаграмкой:
- ___ ___ ___ полное распрямление - полностью лежим всеми тремя частями
- ___ ___ / поднимаем хвост, для уменьшения сил трения в задней части
- / \ / подтягиваем переднюю часть тела, и двигаемся вперёд
- / \ ___ опускаем на землю заднюю часть тела, для совершения броска вперёд и распрямления тела
Итого 4 фазы
Сборка и программирование
Программная реализация движения будет записываться примерно таким образом:
В процессе сборки нужно подобрать центр тяжести всего механизма, что бы он смог двигаться вперёд.
Задача №5
Собрать свой вариант робочервя, и предложить свой вариант кода программы, с учетом своей конструкции, обеспечивающего лучшую скорость перемещения. Использовать можно только 2 сервопривода.



















