И так в прошлой статье я рассказал о переменных и мониторе порта, а сегодня будет урок про сервоприводы(моторчики с регулируемыми углами поворота) (Сразу скажу что плата не обязательна можно работать в Tinkerkad облачный сервис для 3Д модели, аCircuits для создания цепей(если что ищите в интернете))

Разберёмся для чего это нужно. Сервопривод может сдвигать небольшие объекты , поворачивать что-то , например кран от воды(такие сервоприводы могут крутиться только на 180 градусов, но есть модели и лучше).
Начинаем писать
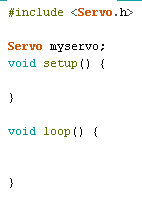
#include <Servo.h> этой командой мы добавляем библиотеку для работы с серво( библиотеки нужны чтобы не писать тонны кода самому)
Servo myservo; ( тут мы объявляем переменную myservo (ВНИМАНИЕ! для серво используется специальная переменная))
myservo.attach(9); тут мы объяснили микроконтроллеру на какой ножке находится серво. (ВНИМАНИЕ для серво используются шим ножки, чаще всего они отмечены знаком~)
myservo.write(180);
здесь му указываем положение в которое должен повернуться сервопривод(delay это задержка в миллисекундах , здесь добавлено для сглаживания)
"Заливаем" прошивку в плату и смотрим результат.
Получилось? если да, всё хорошо идём дальше.(схема подключения будет чуть ниже)
Пишем прошивку для управления сервоприводом с помощью переменного резистора
пишем переменную pos (position позиция) , а далее
pos = analogRead(A0); (здесь мы приравниваем переменную к значанию потенциометра)
pos = map(pos, 0, 1023, 0, 180); (а здесь используем метод map масштабирование для объяснения позиции переменного резистора , для серво)
myservo.write(pos);
Подключаем всё по схеме и крутим ручку потенциометра.
Получилось?(пиши в комментарии , и свои вопросы тоже)
____________________________________________________________
Спасибо всем кто дочитал до конца!
Подпишись на канал, поставь лайк, зови друзей:D.
P.S.Задавайте вопросы, предлагайте идеи , если что-то не понятно просьба сразу писать в комментарии.