Здравствуйте читатели моего канала!
Сегодня я решил показать 3D-принтеры с разной кинематикой. Честно говоря, в интернете нет однозначного мнения о том, какая все-таки схема движения экструдера по осям является наиболее удачной.
Самая распространенная в интернете система принадлежит классическому Prusa Mendel:
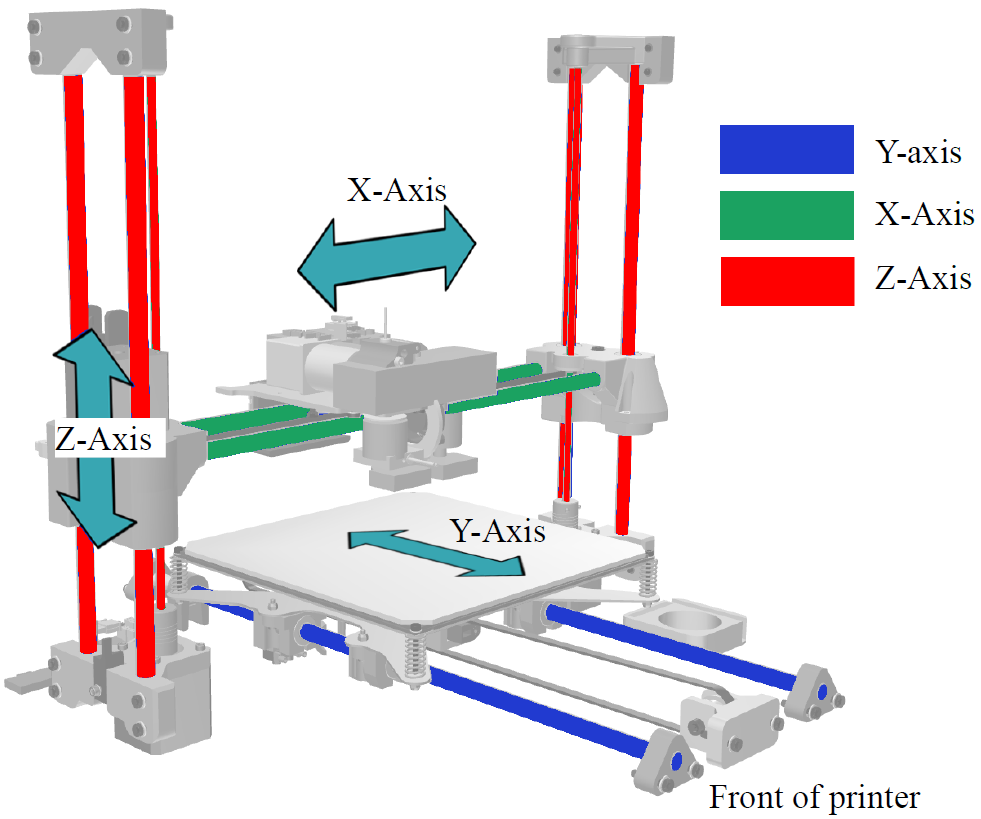
В классификации самих репраповцев такая схема движения называется XZ Head Y Bed. Это означает, что экструдер движется по оси X (влево-вправо) и Z (вверх-вниз), а стол бегает по оси Y (вперед-назад). И все тут вроде бы хорошо
Собрать (а самое главное - настроить) такой принтер гораздо проще. Да и качество печати будет уже на уровне промышленных образцов. Необязательно делать боковины и прочие элементы из акрила при помощи лазерной резки, либо фрезерования. Можно обойтись фанерой (или МДФ):
Советую все-таки воспользоваться услугами лазерной / фрезерной резки - сейчас практически в любом городе есть фирмы (производства), которые предоставляют такие услуги. Денег это будет стоить немного, зато сэкономите кучу времени и нервов.
Delta кинематика.
Штука просто великолепная, а процесс печати доставляет гораздо сильнее, чем от простых принтеров. В инете очень много роликов процесса печати - советую всем посмотреть (если кто еще не видел) - тут например. Самый главный плюс этого принтера в том, что печатная головка может летать по всем осям на сверхзвуковых скоростях. Конечно, это в том случае, если мощности движков хватит, в головка будет обладать небольшой инерционностью. А самый главный минус - что для движения по любой из осей необходимо в любом случае задействовать все три двигателя одновременно. Тут возможен вариант с накоплением суммарной ошибки в точности позиционирования, которая, кроме всего прочего, сильно зависит от наличия люфтов в шарнирах плечей.
Достоинства:
1) Легко кастомизируется. Для увеличения высоты достаточно прикупить 3 куска профиля подлиннее, и увеличить максимальную высоту в настройках.
2) Занимает мало места. Она чаще высокая, чем громоздкая по длине и ширине, за счет этого компактность.
3) Если сделать легкий эффектор ( каретка, на которой установлен хотенд), то можно добиться больших скоростей без потери качества печати.
4) Перемещение по высоте не отличается от перемещения по XY. Таким образом, нет залипания линейных подшипников на переездах стола, как у Cartesian принтеров, лишних двигателей, катающихся на балке...
5) Отсутствие выступающих частей дает возможность закрыть корпус и придать раме жесткости.
6) Эстетическая часть - на работу дельты интереснее залипать.
Недостатки:
1) Сложная математика перемещений, рекомендуется ставить сразу 32-битные платы.
2) Сложная настройка. Частая проблема в настройке - убрать так называемую 'линзу', ведь каждый стержень вращается с радиусом, и при некорректной настройке у вас печатаемая плоскость будет либо выпуклой,либо вогнутой линзой.
3) Сложно и дорого сделать жесткую раму, что бы ее не болтало от постоянных дрыганий кареток.
4) Проблемы точности изготовления деталей - любые неровности и несоосности будут видны, даже если они на одной оси. И они складываются по осям.
Кинематика Ultimaker.
Одна из наиболее распространенных вариаций кинематики.
В принтере Ultimaker двигатели осей XY стоят неподвижно. При помощи целой кучи зубчатых ремней (4 больших и 2 маленьких) и валов они двигают печатающую головку с очень неплохой скоростью. Качество печати у такого принтера одно из самых лучших. Чуть подробнее кинематическая часть.
В этой конструкции лично мне не нравится использование вращающихся валов, которые обязывают использовать бронзовые (или фторопластовые) втулки вместо подшипников качения. Да и валы должны быть идеально ровными, иначе весь механизм будет штормить при движении. Обилие зубчатых ремней я бы тоже не отнес к плюсам конструкции, поэтому ищем дальше.
Плюсы данной кинематики:
1) Стол движется только вдоль одной оси. Вертикальной. И градиент температур никоим образом от этого не страдает. Стол консольный, поэтому желательно предусмотреть ребра жесткости или учесть это толщиной стола.
2) При всей кажущейся сложности кинематической схемы она проста и каждая ось перемещается с помощью своего же мотора.
3) Корпус закрытый, что защищает от сквозняков, и следовательно деламинации. Некоторые для пущего эффекта ставят акриловую дверцу.
Минусы кинематики:
1) Для хорошей печати мало купить пачку ровных валов. Собрать все эти валы правильно воедино та еще задачка. Заодно и купить хорошие подшипники. Не то, китайское барахло, что чаще втюхивают на али, а нормальные подшипники. Если подшипники, что ставят в корпус будут плохо вращаться - печать будет рывками и со сдвигом слоев. Так же, покупая леопардовые втулки латунные подшипники с графитовыми вставками будьте готовы к тому, что они будут люфтить. А если будет люфт - вся конструкция будет стучать.
2) Необходимо выставить правильно все параллели валов. Предлагаю воспользоваться таким девайсом.
4 вала, что идут вдоль стенок корпуса автоматически встают правильно, а вот крестовину важно выставить правильно, что бы получить углы 90 градусов в плоскости XY.
3) Конструкция не предусматривает увеличение области печати с помощью пары кусоков профиля, поэтому размеры хотенда имеют значение. Директ сложновато поставить, но можно при желании.
Калибровка стола проще некуда. Стол часто на 3 точках крепления. Перемещаем хотенд по 3 точкам и крутим барашки.
Кинематика, используемая фирмой BQ, BCN3D ,Magnum, Makerbot.
В частности принтеры компании Makerbot, BQ, BCN3D ,Magnum, клон магнума - Zenit работают на данной кинематической схеме.
В данном случае мы имеем независимое движение каждой из осей, с Z столом и всеми вытекающими из этого сторонами.
Основной недостаток заключается в том, что на катающейся балке с одной стороны висит двигатель, создавая эдакий дисбаланс. Этот недостаток компенсировали в двухэкструдерном варианте - BCN3D Sigma. Там у каждой bowden-головы для перемещения вдоль балки есть свой двигатель. И они установлены по краям балки и уравновешивают друг друга. Для равномерного перемещения каждого из краев балки применяется 2 вала, шкивы и ремни. Ремни необходимо натягивать одинаково.
Достоинства кинематики:
1) Независимое перемещение каждой из осей.
2) Движущийся по Z стол. Градиент температур не страдает 'сдуванием'.
3) Закрытый корпус. Если не закрытый, то есть вполне нормальный с точки зрения эстетики шанс закрыть его.
4) Масштабируемость кинематики возможна. Различные BigREP и иже с ними с метровыми областями печати используют именно эту кинематику, так как различные H-bot/CoreXY будут адово звенеть по причине наличия 4-5 метровых ремней и их растяжения во время ускорений.
Недостатки кинематики:
1) Неуравновешенные массы на движущейся балке, отсюда максимальная скорость печати, с приемлемым качеством не больше 60-80 мм/с. Некоторые умудряются их уравновесить и это не столь заметно.
2) Громоздкие конструкции на валах, дабы избежать дисбалланса при перемещениях.
3) Необходимо следить, чтобы натяжения ремней справа и слева были одинаковы.
Кинематика H-bot/CoreXY.
Следующая по распространению. Два мотора неподвижны, но перемещают каретку по направляющим с помощью одного длинного куска ремня, или с помощью двух, но покороче. Математика сложнее, чем у предыдущих, так как необходимо синхронизировать поворот обоих роторов двигателя. То есть, для перемещения вдоль каждой оси нужно вращать оба мотора, а для перемещения по диагонали - всего 1.
По сути математика для вращения моторов одна и та же, а реализация в механике разная. Один из самых больших недостатков H-bot перед CoreXY состоит в том, что при перемещениях ремень стремится повернуть балку. CoreXY, в отличии от H-bot, приводится в движение при помощи двух ремней.
H-bot.
Достоинства:
1) Ремень необходим всего один, а схема предусматривает его работу без скручиваний.
2) Натягивать один ремень удобнее, чем 2, поэтому в этой схеме нужен всего один нормальный натяжитель.
Недостатки:
1) Ремень имеет свойство растягиваться со временем, а так как величина растяжения напрямую зависит от длины, то необходимо следить за его натяжением. Иначе получатся некрасивые волны на поверхности перед остановками.
2) Необходимо выставлять ролики строго перпендикулярно плоскости XY, так как при небольшом перекосе ролика ремень будет съедаться об буртики ролика. И мы получим такую вот бяку.
Поэтому всегда рекомендую нормально закреплять ролики, а не консольно, дабы избежать изгиба оси ролика от натяжки ремня.
3) Сложная математика, из-за чего на скоростях выше 100 мм/с могут быть проблемы с нехваткой ресурсов 8 битных плат.
CoreXY.
Достоинства:
1) Два коротких куска ремня. Их проще найти, чем один длинный.
2) Силы уравновешивают балку, а не стремятся ее повернуть, поэтому эту кинематику можно собирать и на валах.
Недостатки:
1) Есть схемы с перекручиванием ремней и перехода ремня с одного уровня на другой - для ремня это не очень приятно. Особенно, когда один ремень трется об другой. На видео этот момент есть.
2) Сложность нятяжки ремней. Их необходимо натягивать одинаково, иначе силы нятяжки будут стремиться повернуть каретку.
3) Сложность сборки и разработки. Необходимо выдержать вертикальность роликов, относительно горизонтальности площадки для установки моторов и рельс. Небольшой перекос роликов приведет к тому, что ремень будет стремиться съехать по ролику, а если будет упираться в буртик ролика, то будет скрипеть, если буртик большой, а если маленький - то будет пытаться на него заехать, как на фото из описания h-bot.
Общий недостаток кинематики - плохая масштабируемость. То есть ставить такую кинематику для области печати больше 300*300 весьма проблемно просто из-за удлинений ремня при печати. Для небольших принтеров с большой скоростью печати - одна из лучших кинематик.
Резюмируя, хотите небольшой принтер (не больше 300*300 мм) с шустрой кинематикой? Тогда вам к Ultimaker или H-bot/CoreXY. Нужен принтер с большой областью печати или с 2 независимыми экструдерами? Тогда к Makerbot. Если печатать вазочки, кальяны и достаточно высокие детали - дельта. Для всего остального есть классика - Prusa.
С чего начался мой путь 3D печать...
Появился второй 3д принтер
Первая 3D печать на 15 часов
Спасибо, что дочитали до конца!
Буду рад вашим комментариям!