Все больше внимания уделяется использованию роботов-скалолазов в опасных условиях, например, на фасадах высотных зданий, самолетов и ядерных установок. Подъемные роботы могут повысить эффективность работы, защитить здоровье людей и сэкономить средства.
Например, в военной области они могут выполнять такие задачи, как наблюдение, разведка и захват целей. В химической области они могут использоваться для технического обслуживания и пескоструйной обработки резервуаров для хранения, инспекции трубопроводов или газопроводов и окраски распылением.
Известно, что механизм играет важную роль в работе робота. В последнее время этот механизм получает все большее внимание со стороны исследователей.
В основном, исследования в области настенного робота-скалолаза сосредоточены на двух аспектах: локомотивном механизме и механизме сцепления.
С точки зрения локомотива, роботов-скалолазов можно разделить на четыре категории:
- Опорная конструкция. Робот, использующий опорный механизм ног, обычно адаптирует вакуумную всасывающую технику или магнитную адгезию. Эти роботы обладают хорошей проходимостью и адсорбционной способностью при низком уровне шума при работе. Тем не менее, их скорость движения обычно низкая.
- Гусеничная структура. Робот, оснащенный гусеничной структурой, обычно адаптирует технологию магнитной адгезии или вакуумной аспирации. Эти роботы обладают хорошей адсорбционной способностью и высокой скоростью перемещения. Однако их способность преодолевать препятствия относительно невелика.
- Колесная структура. Робот, использующий колесный локомотивный механизм, обычно использует метод адгезии отрицательного давления. Этими роботами легко управлять и они обладают относительно высокой скоростью перемещения. Тем не менее, они обладают низкой проходимостью и потребляют много энергии при высоком уровне шума при работе.
- Комбинированная. Последний тип - робот, сочетающий в себе вышеперечисленные локомотивные механизмы для улучшения восхождения. Данный вид роботов появляется в настоящее время и свидетельствует о новом тренде развития робота-скалолаза.
Разработан новый роботизированный механизм для подъема на стену. Этот механизм состоит из модуля адгезии при отрицательном давлении, модуля вакуумного всасывания и планетарного редуктора. Он адаптирует гибридный механизм передвижения на колесах-ножках с преимуществами колесных роботов и подпрыгивающих роботов, что позволяет роботу быстро перемещаться и легко преодолевать препятствия.
Конфигурация механизма
Основная концепция конструкции робота заключается в новом подъемно-переставном механизме, объединяющем два различных локомотивных механизма и два различных типа адгезии.
Данный подъемно-переставной механизм состоит из модуля адгезии при отрицательном давлении, модуля вакуумного всасывания и специально разработанного планетарного редуктора.
- Модуль отрицательного давления состоит из центробежного вентилятора, большой присоски, 3-колесного механизма и большой передачи в виде корочки.
- Вакуумный модуль всасывания состоит из блока линейного перемещения, вакуумного всасывающего устройства, опорного колеса и большой передачи в виде корки.
Этот механизм подъема имеет четыре степени свободы. Устройство линейного перемещения имеет одну степень свободы и приводится в действие для реализации движения вытягивания вакуумного присоска.
Колесный локомотивный механизм состоит из двух ведущих колес и роликового колеса и имеет две степени свободы. Регулируя скорость двух ведущих колес, робот может реализовать движение по прямой и поворот в плоскости.
Планетарный редуктор имеет одну степень свободы, что означает, что перемещение робота может быть реализовано при использовании только одного двигателя. Движение планетарного редуктора в сочетании с движением присоски может реализовывать перемещение между наклонными поверхностями.
Анализ режимов локализации
С точки зрения конструкции гибридного локомотивного механизма, колесный локомотив является основной схемой движения, играющей важную роль в быстром движении. Режим перемещения в основном используется для преодоления препятствий и пересечения наклонных поверхностей.
Гибридный механизм обладает преимуществами двух локомотивных механизмов и повышает адаптируемость робота к окружающей среде.
Колесная локализация. Основной функцией колесной локомоции является прямолинейное движение и вращение. Кроме того, изменяя скорость вращения ведущих колес 3-колесного локомотивного механизма, робот может легко реализовать движение вращения.
Движение по поверхности. Робот может перемещаться по многим видам плоских поверхностей (дерево, металл, стекло). При этом робот может прилипать к поверхности под любым углом. Он может безопасно передвигаться по внешней поверхности самолета.
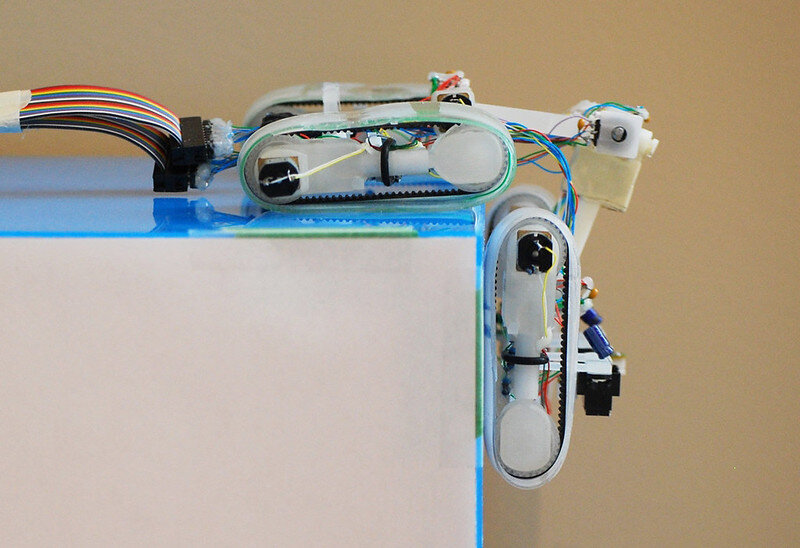
Пересечение границы от земли до стены. Комбинируя два вида локомотивных механизмов и два типа техники сцепления, робот может легко перемещаться между наклонными поверхностями. Робот может перейти с земли на поверхность, когда внутренний угол между землей и поверхностью находится в диапазоне от 90 до 180 градусов, а внешний угол - в диапазоне от 0 до 20 градусов.

Гибридный механизм передвижения на колесах-ножках и преимуществами колесных роботов и подпрыгивающих роботов, позволяет роботу быстро перемещаться и легко преодолевать препятствия. Специально разработанный планетарный редуктор сочетает в себе два модуля механизма, что улучшает ходовые качества робота.
Робот обладает такими характеристиками, как высокая скорость, отличная способность перемещаться между наклонными поверхностями и легко адаптируется на изогнутых поверхностях.