Простая схема, показанная на рисунке, может управлять униполярным шаговым двигателем (от 6 В до 15 В), используя всего несколько компонентов. Такие двигатели в настоящее время широко доступны, в частности, из дисководов гибких дисков, принтеров и сканеров.
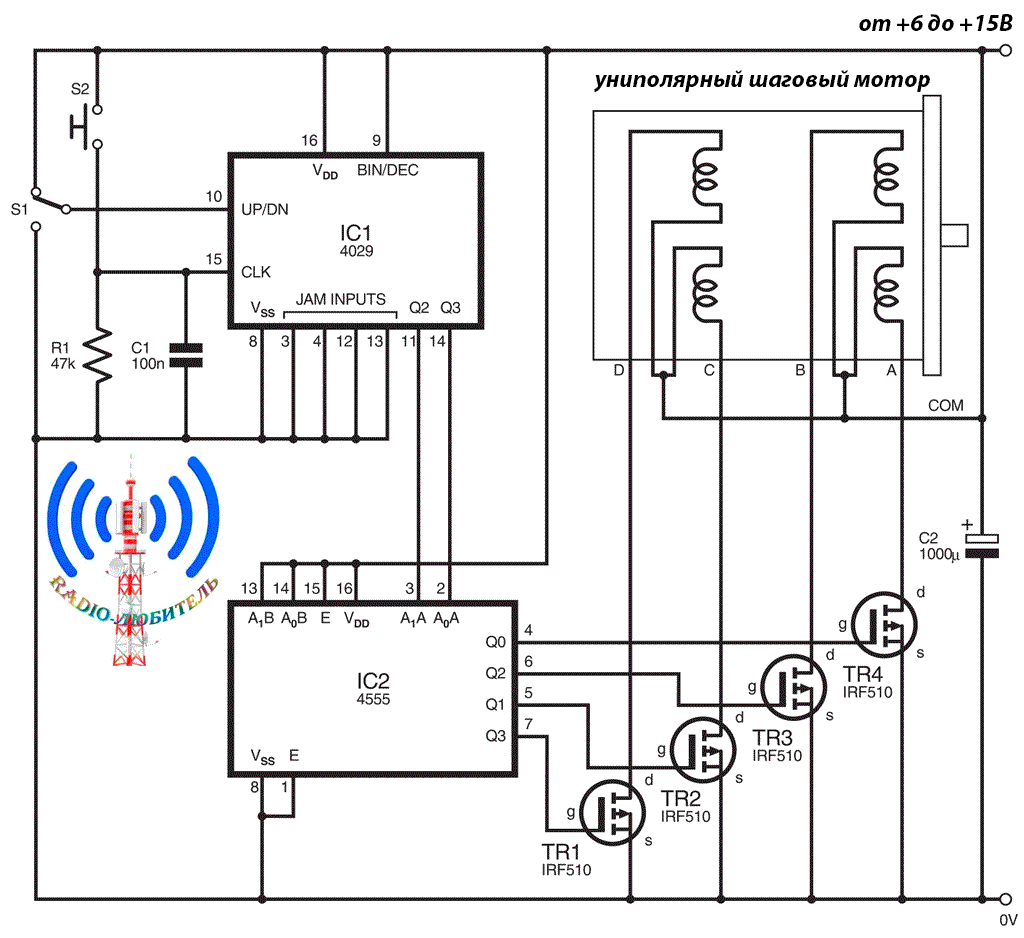
Как показано, схема подключена для ручного управления, причем переключатель S1 определяет направление вращения двигателя (по часовой стрелке / против часовой стрелки), а кнопка S2 вращает двигатель по одному шагу за раз. Если удалить S1, S2, R1 и C1, то выводы 10 и 15 микросхемы IC1 могут управляться цифровыми входами.
IC1 подключается как 4-битный двоичный счетчик с повышением-понижением. Состояние входа «вверх-вниз» на выводе 10 (через S1) приводит к изменению направления вращения двигателя. В зависимости от состояния контакта 10 счет увеличивается или уменьшается по мере того, как цифровые импульсы поступают на вход 15 синхронизации, что приводит к вращению двигателя по часовой стрелке или против часовой стрелки.
Выходы IC1 с Q1 по Q4 производят четырехразрядное двоичное число, которое преобразуется в десятичное, от одного до четырех, для последовательности четырех фаз однополярного шагового двигателя. Две центральные цифры двоичной последовательности IC1 повторяются каждые четыре шага, поэтому выходы Q2 и Q3 выбираются для синхронизации декодера IC2.
Четыре мощных полевых МОП-транзистора IRF510 (или аналогичные) используются для привода шагового двигателя. Они имеют то преимущество, что способны выдерживать большой ток, при этом обеспечивая минимальное падение напряжения на двигателе. Поскольку шаговые двигатели работают с высокой температурой (они часто рассчитаны на температуру более 100 ° C), в общий провод двигателя может быть вставлен резистор подходящего номинала, чтобы избежать чрезмерного нагрева, если полная мощность не требуется. Требуется также соответствующий источник питания - обычно 500 мА.



















