Сервопривод (сервомотор) является важным элементом при конструировании различных роботов и механизмов.
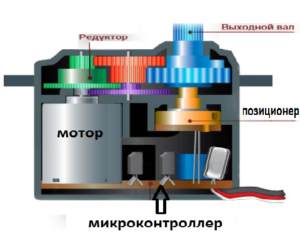
Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике.
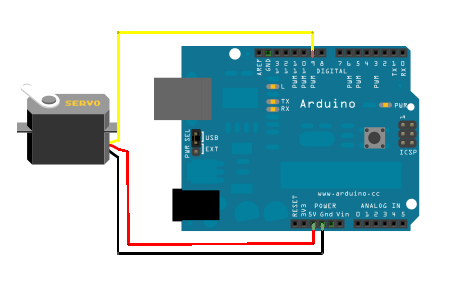
Подключение серводвигателя к ардуино
Не рекомендуется подключать мощные серво напрямую к плате , т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью – повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в “дергании” серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Алгоритм работы прост:
- Для начала мы подключаем Servo.h
- Создаем объект класса Servo
- В блоке setup указываем, к какому пину подключен серво
- Используем методы объекта обычным для C++ способом. Самым популярным является метод write, которому мы подаем целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-другому).
Пример простого скетча для работы с сервоприводом
##include <Servo.h>
Servo servo; // Создаем объект
void setup() {
servo.attach(9); // Указываем объекту класса Servo, что серво присоединен к пину 9
servo1.write(0); // Выставляем начальное положение
}
void loop() {
servo.write(90); // Поворачиваем серво на 90 градусов
delay(1000);
servo.write(1800);
delay(100);
servo.write(90);
delay(1000);
servo.write(0);
delay(1000);
}
Если загрузка прошла успешно то сервопривод начнёт крутится
С вами был Ардуинщик всем пока