Многие из нас даже не догадываются о том, что для правильного поворота автомобиля или робота, колеса должны поворачиваться под разными углами. Ведь кажется все просто - покрутил руль, рычаги повернули одинаково колеса, и поехал. Но, не так все просто...
Давайте составим схему, и сразу станет все ясно.
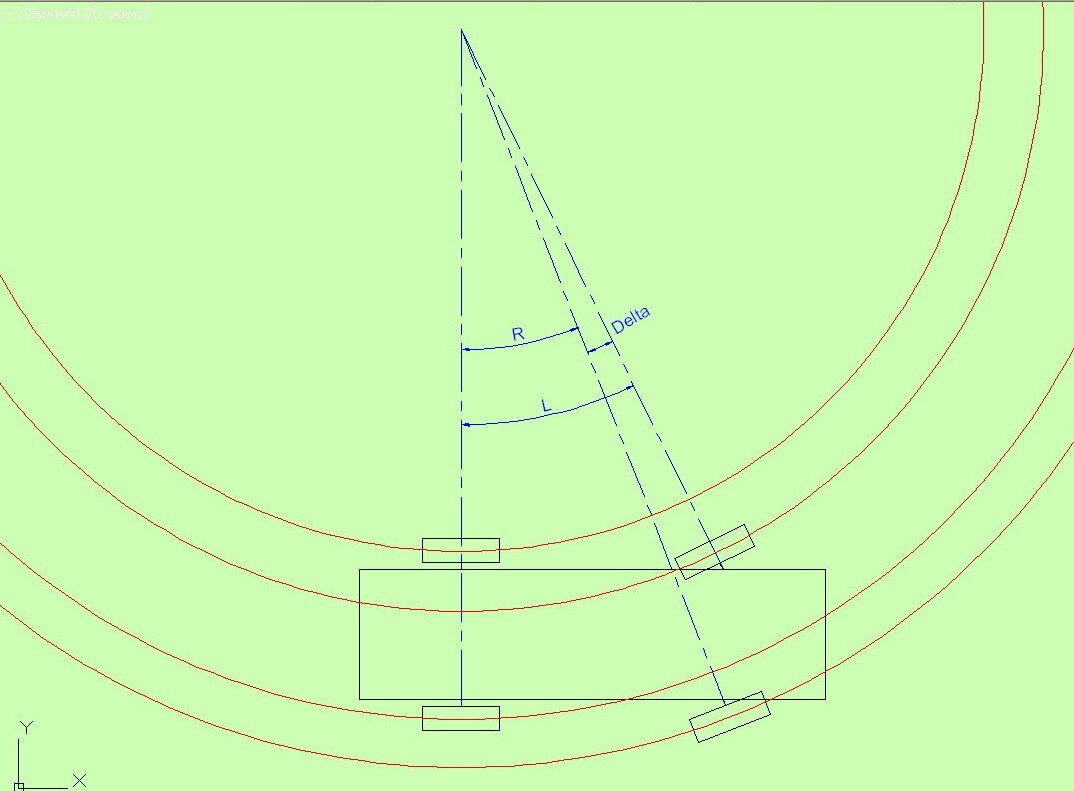
Итак на схеме:
- R - угол поворота правого колеса;
- L - угол поворота левого колеса;
- Delta - разница углов поворота колес;
- Синим цветом - оси колес;
- Красным - траектории движения колес при повороте.
Как мы видим углы поворота колес робота можно легко высчитать с помощью формул тригонометрии !
Тот, кто знаком с автомобилями не понаслышке знает, что это все делается с помощью рулевой трапеции механически.
Рулевая трапеция была изобретена Рудольфом Аккерманом. Я же решил осуществить поворот с помощью 2-х серводвигателей, а разница в угле поворота высчитывается программно.
Я решил сделать так: устанавливаются два сервопривода, каждый из которых управляет своим колесом робота (левым, правым). А углы поворота высчитываются программно на микроконтроллере Ардуино, с помощью формул тригонометрии.
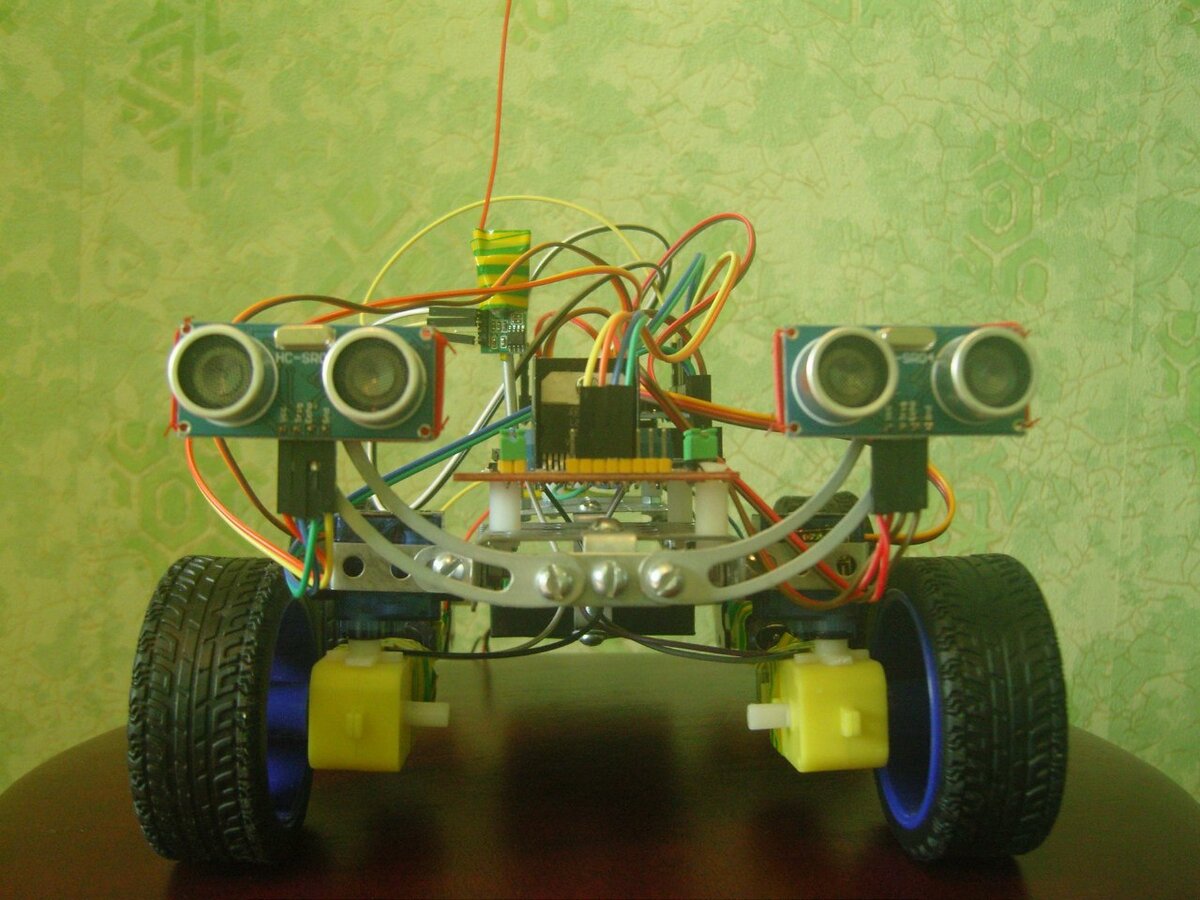
Так выглядит конструкция колесного робота на фото:
А так поворот колёс робота на видео:
Возникает вопрос, как поведет себя такая конструкция робота в ситуации, когда будут повороты на большой скорости?
В данном проекте такое и не предполагалось. Вообще это слабые сервоприводы и большую нагрузку не выдержат.
На небольшой скорости работает хорошо, видео объезда роботом препятствий:
Спасибо за внимание !
Официальные страницы в интернете:
- Канал на YouTube: Робототехника видео
- Рынок робототехники: Роботехмаркет
Еще статьи по робототехнике:
* Исследование диаграммы направленности ультразвукового датчика
* Колесный робот ардуино. Описание проекта.