Всем привет! Мы уже проводили обзор технологии LiDAR (обнаружения препятствий и определения дальности до них) и рассмотрели несколько популярных конструкций сканеров. Главным образом, для перемещения луча лазера по окружающему пространству (развертка) используются механические устройства.

Для получения цилиндрической развертки при сканировании окружающего пространства хорошо подходит вращающаяся платформа, приводимая в движение электромотором. Как известно, все что может сломаться - сломается, а уж всякая механика этим очень грешит. В 21 веке не место всему тому, что требует ласки, чистоты и смазки, по крайней мере в устройствах, которые обязаны быть очень надежными. Левитирующие подшипники это уж очень дорого, поэтому давайте посмотрим основной принцип не механической развертки лазерного луча.
Как SSD, только LiDAR
Ситуация сейчас очень напоминает недавние события на рынке накопителей информации. Долгое время господствовали HDD или жесткие магнитные диски, но потом их начали заменять более технологичные SSD накопители.
Рассмотрим общее устройство LiDAR без движущихся частей. Лазерный луч это основа технологии, поэтому без него никуда. Будучи в единственном экземпляре для того чтобы просканировать окружающее пространство он был вынужден передвигаться на какой-то механической платформе. Производители оборудования решили изменить ситуацию и первое что пришло в голову это увеличить количество лучей.
Благодаря успехам полупроводниковой техники лет 30 назад появился на свет сравнительно дешевый поверхностно-излучающий лазер с вертикальным резонатором (VCSEL). Главное это то, что лазер перестал быть только трубкой, а смог стать пластиной. Массив таких пластин с раздельным управлением решил проблему генерации множества лучей.
Итак, новая версия сканера устроена следующим образом:
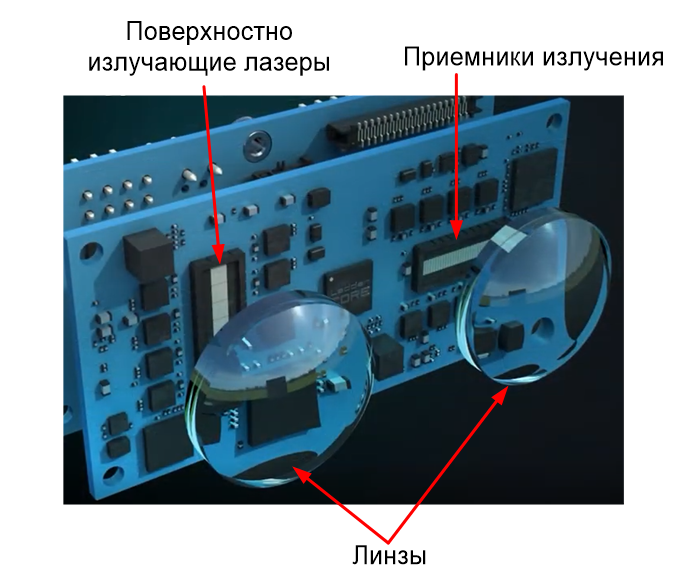
На печатной плате располагается массив VCSEL, накрытый оптической линзой. Немного в стороне располагается массив приемников отраженного излучения, также накрытый линзой. Между этими массивами располагается интегральная схема, управляющая массивом лазеров, считывающая показания с фотоприемников и выполняющая вычисления расстояний до объектов. Назовем эту микросхему Вычислителем.
Фотоприемники на основе однофотонных лавинных диодов (SPAD) обладают высокой чувствительностью и способны улавливать самые слабые отраженные лучи. Им тоже уже исполнилось более 20 лет.
Вычислитель заставляет поверхностные лазеры последовательно излучать луч, который проходит через линзу и преобразуется в световую плоскость. Каждый лазер создает свою плоскость.
Последовательно активирующиеся фотоприемники получают отраженный свет, проходящий через собирающую линзу. Первые отраженные фотоны вызывают срабатывание диодов и по времени задержки распространения света вычисляется дистанция до объекта.
Поскольку фотоприемников много, то в совокупности с работой линзы они способны получать раздельную информацию от своих узких секторов пространства. Таким образом, управляя включением и выключением лазеров и приемников можно имитировать движение лазерного луча по окружающему пространству.
Итого, получается секторная развертка луча лазера, состоящая из элементов, в каждом из которых вычисляется дальность до объектов:
Если каждую измеренную дистанцию обозначить своим цветом, то техническое зрение представляет собой двумерный массив все тех же расстояний, однако это легче воспринимается человеком.
Двумерный массив расстояний преобразуется в трехмерный массив, описывающий окружающее пространство. Разрешение устройства зависит от количества лазеров и фотоприемников. Недостатком такой развертки является ограниченность сектора обзора, однако несколько таких сканеров позволяют получить информацию об окружающем мире со всех 360 градусов.
Поддержите статью лайком если понравилось и подпишитесь чтобы ничего не пропускать.
Также не обойдите вниманием канал на YouTube. Подписки и лайки будут приятным ответом от аудитории.