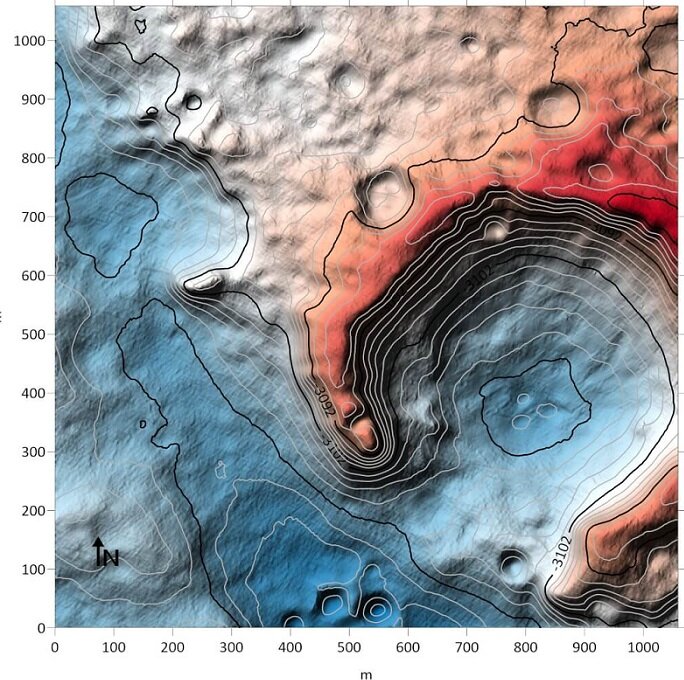
Исследователи из Дортмундского технологического университета разработали точные трехмерные модели местности в посадочном эллипсе ровера Rosalind Franklin, которые готовятся ESA и Роскосмосом в рамках миссии ExoMars. Модели DTM (цифровые модели местности) имеют разрешение около 25 сантиметров на пиксель и помогут ученым изучить географию и геологические характеристики региона и, таким образом, спланировать путешествие ровера по области.
Чтобы повысить точность моделей, исследователи разработали инновационную технику, которая интегрирует атмосферные данные в цифровой пейзаж. Модели были представлены Кей Уолфарт во время встречи EPSC-DPS в Женеве.
Модели DTM основаны на фотографиях Mars с высоким разрешением, сделанных с помощью прибора HiRISE, установленного на борту зонда Mars Reconnaissance Orbiter. Фотографии с этого инструмента широко использовались в классическом методе объединения двух фотографий, сделанных под разными углами, для воссоздания трехмерного изображения местности. Тем не менее, обычные стереотипы имеют свои ограничения, когда они применяются к безотказным, однородным областям, которые характеризуют множество пыльных и песчаных планетарных поверхностей, таких как место посадки нового марсохода.
Oxia Planum, место посадки, выбранное рабочей группой ExoMars по выбору места посадки для ровера Rosalind Franklin, является относительно плоским, благодаря чему риск жесткой посадки был минимизирован, и у ровера есть доступ ко многим областям, где он будет выполнять свою миссию. Область богата минералами глинистой и структуры с древних русел рек, которые могут хранить следы прошлой жизни на Марсе.
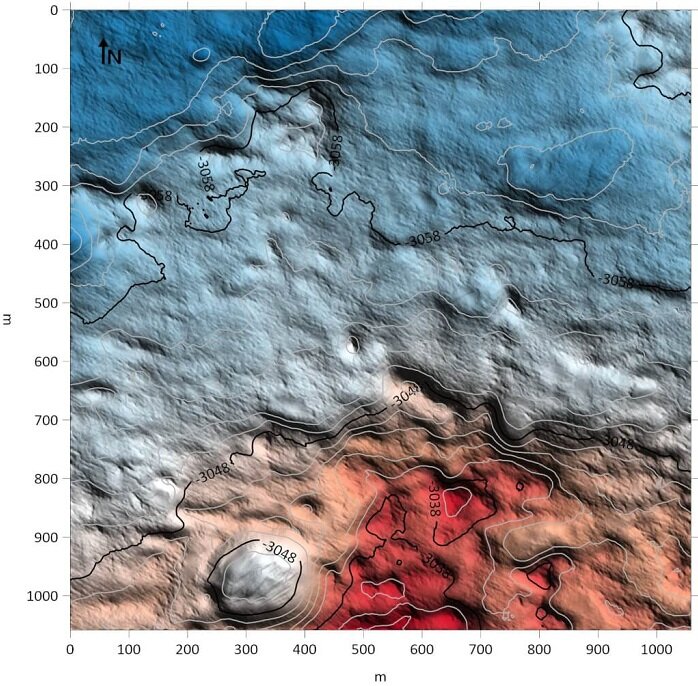
Чтобы улучшить DTM, ученые ЗДЕСЬ Dortmund University применили технику “Shape from Shading” (Чтение формы с тенями), в которой интенсивность отраженный свет в фотографии измеряется, преобразовывается в информацию о наклоне поверхности. Затем данные о наклонах накладываются на стереофонические изображения, что приводит к лучшим оценкам в отношении трехмерной формы поверхности.
Кей Волфарт объясняет: "с помощью этой техники мы можем воспроизводить даже мелкие детали, такие как дюнные морщины внутри кратера"”
Марсель Гесс, первый автор исследования, говорит: «Мы сосредоточились прежде всего на взаимодействии света с поверхностью Марса. Области, наклоненные к солнцу, кажутся более яркими, чем те, которые наклонены в противоположном направлении. Наш подход включает в себя количество отраженного света с учетом модели атмосферы, которая также включает атмосферные эффекты, приводящие к рассеянию света ».
Ровер Rosalind Franklin будет оснащен инструменты научные для исследования горных пород и вещества поверхности Oxia Temporale. На борту вездехода будет также сверло, которое позволит нам заглянуть под поверхность и взять образцы, которые затем будут транспортироваться в бортовой лаборатории, предназначенной для обнаружения biosygnatur, а также инструменты для измерения боковой содержания воды. Марсоход будет запущен в космос летом 2020 году на борту российской ракеты Протон-М и достигнет Марса в марте 2021 года.