Хьюстон Мехатроникс построил подлодку-робота, которая превращается в опытного гуманоида...
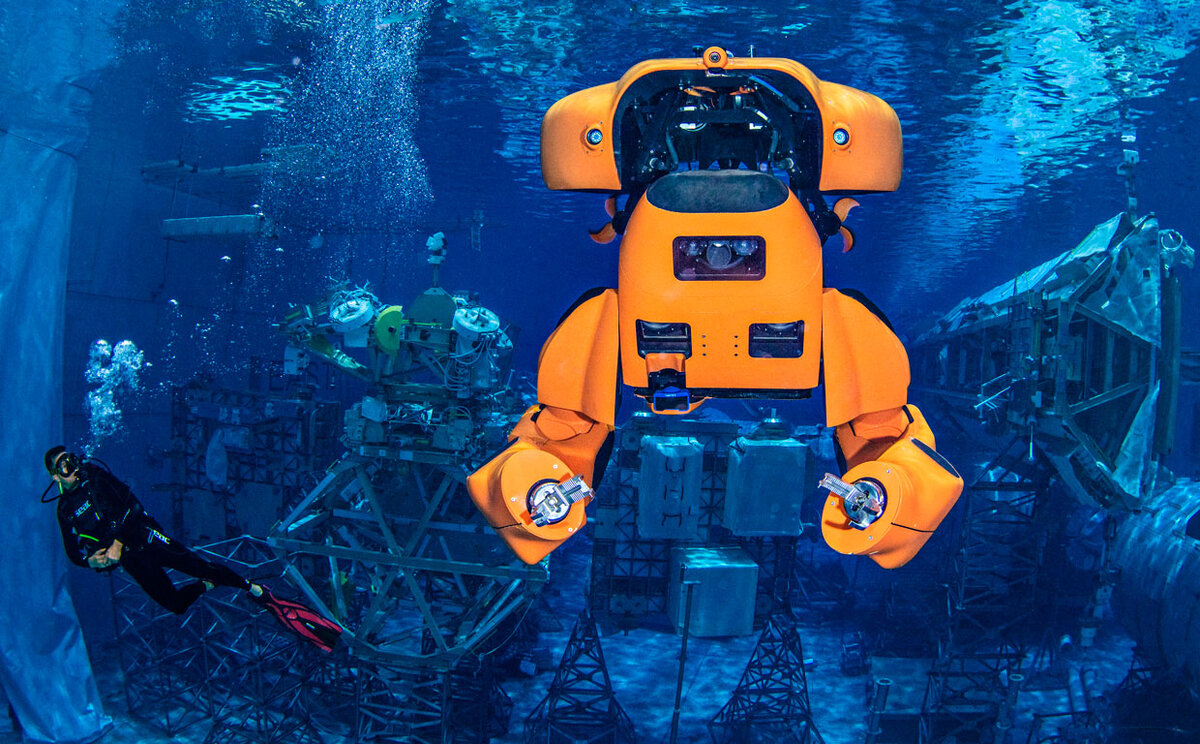
Всего в нескольких минутах ходьбы от меня, два астронавта тренируются в походе в космос. Я дрейфую невесомо, в тишине, нарушенной только моим собственным дыханием и периодическими обновлениями из Mission Control в моей гарнитуре. Но это не темная пустота пространства. Я в Хьюстоне, занимаюсь подводным плаванием в огромном бассейне, который НАСА использует для подготовки астронавтов к работе в условиях невесомости. И хотя наблюдать за фигурами на работе - это захватывающе, я пришёл не для того, чтобы их увидеть. Я здесь, чтобы взглянуть на Акванота, ярко-оранжевого робота, с которым мы делимся бассейном.Акванавт плавно скользит по воде, как миниатюрная подводная лодка. На первый взгляд, она ничем не отличается от других беспилотных подводных аппаратов, или УФУ, оснащенных датчиками для сбора данных и подруливающими устройствами для силовых установок. Затем, в сцене из фильма "Трансформеры", верхняя часть корпуса робота поднимается с базы, обнажая две массивные руки, развернутые с обеих сторон. Клиновидная головка, заполненная датчиками, вращается на месте, и в считанные секунды процесс трансформации завершается. Гладкая подводная лодка теперь наполовину гуманоидный робот, готовый к работе.Aquanaut представляет собой радикально новый дизайн, созданный его создателями на стартапе под названием Houston Mechatronics Inc. (HMI), надежда полностью изменит подводную робототехнику. Обычные УФ-излучатели, как правило, подразделяются на две категории: торпедообразные подводные аппараты свободного плавания, которые используются для съемки на большие расстояния, и аппараты с дистанционным управлением, привязанные к опорным судам и используемые для подводных манипуляций. HMI хочет объединить оба этих режима в один робот. Это смелый подход, который никто раньше не пытался применить.
Инженеры HMI, которые часто шутят, что строительство трансформатора было одной из их долгосрочных карьерных целей, убеждены, что это можно сделать. Aquanaut был разработан в первую очередь для обслуживания подводных нефтегазовых установок. Компании, владеющие и управляющие этой инфраструктурой, тратят огромные суммы денег на ее инспектирование и обслуживание. Они полагаются на роботизированные технологии, которые не претерпели фундаментальных изменений за последние десятилетия, в основном из-за проблем, связанных с работой в таких экстремальных условиях. Для HMI, однако, это не проблема: из 75 сотрудников более двух десятков работали в NASA. Экстремальные условия - это то, в чем они лучше всего разбираются.Соучредитель и технический директор HMI Ник Радфорд в течение 14 лет работал над перспективными проектами в области робототехники в космическом центре NASA Johnson в Хьюстоне. "Я признаю, что попасть в космос сложнее, чем попасть под воду", - говорит он. "Но пространство - это нетронутая среда. Под водой, вещи необычайно динамичны. Я еще не решил, в 10 раз тяжелее или в 50 раз тяжелее для роботов, работающих под водой, чем в космосе".Больше, чем встречается с глазами.Aquanaut уникален среди беспилотных подводных аппаратов, поскольку может трансформироваться из гибкой подводной лодки, предназначенной для дальних плаваний, в полугуманоидного робота, способного выполнять сложные манипуляционные задачи. Вот как происходит трансформация.
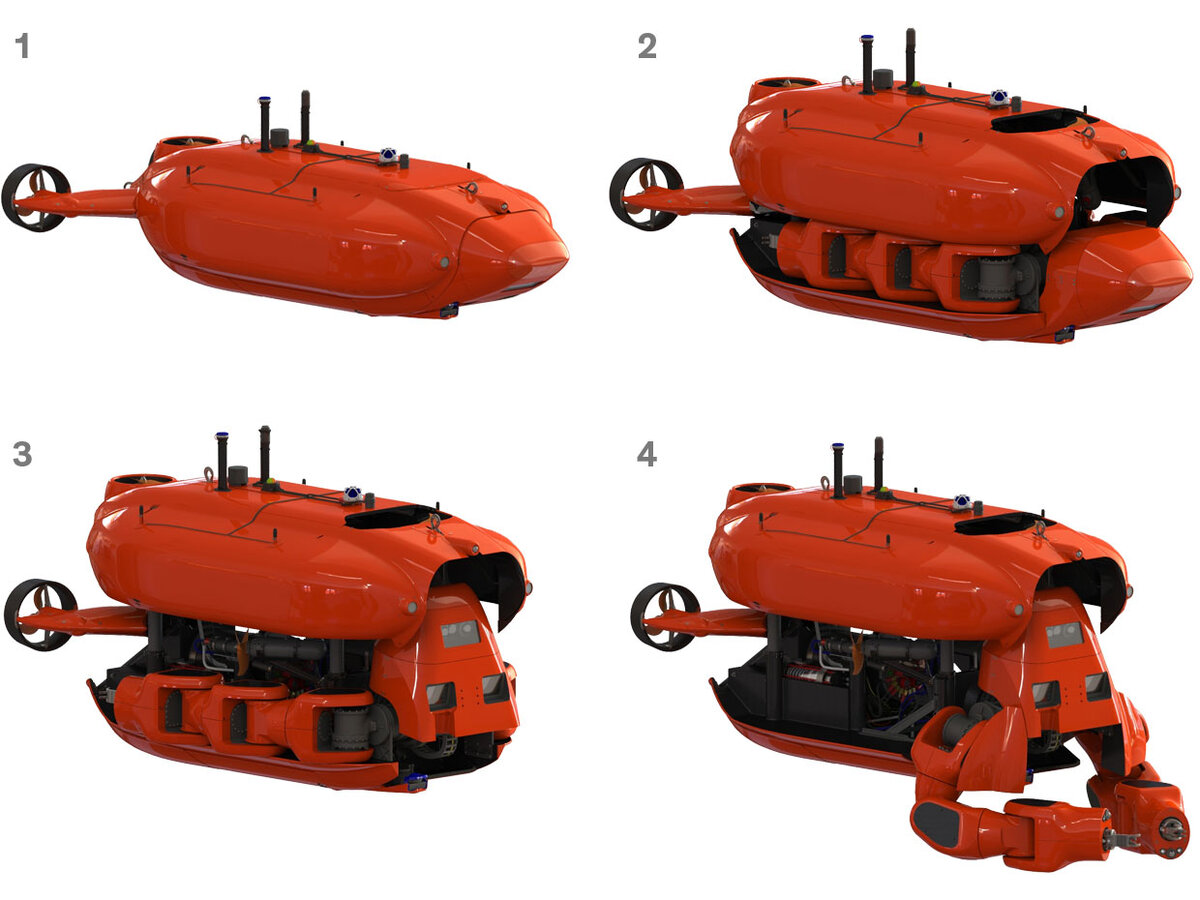
Акванавт путешествует в оптимизированном режиме подводной лодки к месту проведения подводных работ.Когда робот прибывает на объект, верхняя часть его корпуса поднимается вверх, обнажая две массивные руки и клиновидную голову.Головка, несущая стереокамеры, 3D-датчик и гидролокационную систему, поворачивается на место.Робот раскладывает свои мощные руки, оснащенные датчиками силы и захватами типа кулачков.Рэдфорд и его соучредители Мэтт Ондлер и Редж Берка привлекли венчурный капитал на сумму более 23 миллионов долларов США с момента основания HMI в 2014 году. Теперь, после бесчисленных итераций дизайна, Акванот наконец-то собирается вместе. Однако перед тем, как отправиться в открытый океан, робот должен зарекомендовать себя в более контролируемых условиях, а это значит, что он должен поплавать в бассейне NASA.Лаборатория нейтральной плавучести (ЛНБ) НАСА, в которой хранится 23,5 млн. литров воды и максимальная глубина которой составляет 12 метров, достаточно велика, чтобы вместить полномасштабный макет большей части территории Международной космической станции, и для этого есть место. Космонавты тренируются для космических походов в НБЛ, приближаясь к невесомости, как можно ближе к ней на земле. Сегодня поздним утром, в конце марта, HMI взял на себя управление северной частью объекта для тестирования Aquanaut.Десять метров вниз и с двумя резервуарами нитрокса на спине, я стараюсь держать себя устойчиво, отслеживая движение робота по воде. Акванавт находится в целости и сохранности всего около восьми дней, но испытания идут хорошо. Единственная проблема - это сбой связи с руками, но команда HMI не в восторге; они знают, что впереди еще много работы, и робот вернется сюда рано утром.Рэдфорд рассказывает мне, что ему нравится безумная рутина запуска стартапа, что резко контрастирует с типичными темпами работы такого огромного государственного агентства, как НАСА. До HMI он пять лет работал главным инженером программы НАСА "Робонавт", разрабатывая гуманоидный робот, который летал на Международную космическую станцию, а затем возглавил разработку Валькирии, еще более сложной гуманоидной платформы. В его офисе в HMI небольшие модели прототипов Aquanaut с 3D-печатью прекрасно вписываются в настенное искусство с участием "Железного человека" Валькирии и Марвела.
"Тот тип навыков, которыми мы обладаем в НАСА, - говорит он, - размещение роботов в удаленных местах и получение от них возможности выполнять полезную работу в суровых условиях, наилучшим образом соответствует этой большой проблеме: работать на море".
Большая часть того, что мы видим и слышим о морской нефтегазовой промышленности, включает в себя работу, выполняемую с платформ, где люди проводят подводные буровые работы с поверхности моря. Платформы являются наиболее заметной частью процесса, но на морском дне также имеется огромное количество сложной инфраструктуры.Устья скважин на дне океана закрыты металлическими узлами, используемыми для контроля потока углеводородов на поверхность. Эти сооружения, покрытые трубами, клапанами, коллекторами и измерительными приборами, настолько сложны, что широко известны как рождественские елки. Некоторые из них размером с четырехэтажное здание.
Иллюстрация того, как Акванавт работает в обеих формах.
Работник водного хозяйства: В подводном режиме Aquanaut исследует и инспектирует нефтегазовое оборудование, размещенное на морском дне. В гуманоидном режиме робот использует руки для захвата специализированных инструментов и управления клапанами, управляющими потоком углеводородов на поверхность.Для проведения текущего технического обслуживания устья скважины или для изменения производительности скважины некоторые клапаны на дереве должны быть повернуты, а в скважинах на глубине ниже 300 метров, где обычно не работают водолазы, единственный способ сделать это - с помощью роботизированного автомобиля.В течение десятилетий установившийся порядок работы на глубоководных скважинах заключался в отправке на буровую площадку подводного аппарата с дистанционным управлением (ДУА). Но вы не можете просто послать АДУ самостоятельно - вам также придется послать большое судно поддержки, укомплектованное высококвалифицированными специалистами, чтобы оно служило базой для работы АДУ, которое практически не имеет автономии и привязано к поверхности для питания и управления. Это очень быстро обходится очень дорого, типичные рабочие места стоят от десятков до сотен тысяч долларов в день.HMI планирует перерезать перерезание шнура, чтобы люди не нуждались в нем больше всего. Акванавту не понадобится ни трос, ни корабль поддержки. В режиме подводной лодки он перейдет в глубоководный пункт назначения, где превратится в гуманоидную форму, развернув свои мощные руки. Каждая рука оснащена датчиками крутящего момента и имеет восемь осей движения, похожие на оси человеческой руки. Кронштейны Aquanaut также оснащены захватами, способными поворачивать клапаны на подводных "деревьях" и даже управлять специализированными инструментами для технического обслуживания, которые робот несет с собой во внутреннем грузовом отсеке.Aquanaut будет выполнять задачи с операторами, которые контролируют, но не контролируют его напрямую. И как только работа будет закончена, робот автоматически вернется домой. Рэдфорд говорит, что такой подход позволит ускорить развертывание Акванота и удешевить его эксплуатацию по сравнению с сегодняшними АДУ. По его оценкам, затраты могут быть значительно ниже половины рыночной стоимости традиционной операции.Как раз вовремя. По словам Чака Ричарда, пионера подводных технологий, который в настоящее время является председателем Комитета по АДУ Общества морских технологий, базирующегося в Вашингтоне, О.К., низкая цена на нефть за последние несколько лет привела к снижению прибыли и росту конкуренции среди нефтяных компаний, что стимулирует внедрение новых технологий. Ричардс, чья фирма, C.A. Richards & Associates, в Хьюстоне, поставляет оборудование десяткам подводных компаний, среди которых HMI, объясняет, что хотя индустрия, вероятно, будет осторожна в отношении таких инноваций, как акванавт, она также будет рада увидеть, что может сделать робот.Ричардс объясняет, что когда преимущества коммерческой технологии ДУА стали очевидны после ее внедрения в 1970-х годах, промышленность с нетерпением ждала возможности ее применить, хотя вначале все было немного нелегко. "Нефтяные компании были очень полезны и терпеливы в отношении отрасли ДУА по мере ее развития, - говорит он, - и я думаю, что они будут такими же, как и более автономные машины".
Smart Sub: Инженеры из Houston Mechatronics осматривают голову Aquanaut, где расположены основные датчики робота, в процессе подготовки к подводному испытанию [сверху]. В то время как обычные беспилотные подводные аппараты требуют, чтобы операторы маневрировали ими в режиме реального времени, Aquanaut использует свои сенсорные и вычислительные системы, чтобы вести себя более автономно, способно выполнять задачи с операторами. Главное преимущество Aquanaut по сравнению с обычными АДУ зависит от его не привязанной работы, и для реализации этой возможности терминалу HMI пришлось решить несколько ключевых проблем. Первый - просто доставить робота на оффшорную рабочую площадку без большого судна поддержки. В то время как Aquanaut может быть развернут с относительно небольшой лодки или даже выпал из вертолета, робот может пройти более 200 километров в режиме подводной лодки. По прибытии робот переходит в режим АДУ с дополнительными подруливающими устройствами, спрятанными внутри корпуса, что делает его более маневренным.Трансформация сама по себе является еще одной серьезной проблемой и источником многих внутренних дискуссий. "Мы боролись всю дорогу, пытаясь доказать, что нам не нужно этого делать, - говорит Сандип Яяти, главный инженер компании Aquanaut, который до HMI был главным силовым проводником на Лунном поисковике в NASA. Однако в конечном итоге группа решила, что выгоды перевешивают дополнительные сложности: Они собирались построить свой подводный трансформатор.Для того чтобы Aquanaut мог так сильно изменить свою форму, робот оснащен четырьмя пользовательскими линейными приводами, которые разделяют верхнюю и нижнюю половины своего корпуса. Дополнительные двигатели, также изготовленные по индивидуальному заказу и расположенные в водонепроницаемых корпусах, приводят в действие рычаги и голову. Для питания Aquanaut использует литий-ионный аккумулятор, аналогичный тем, что используются в электромобилях. Полное преобразование в настоящее время занимает всего 30 секунд.Но, пожалуй, ни одна из этих проблем не является столь значительной, как разработка системы управления акванавтом. Традиционные АДУ имеют несколько каналов прямой трансляции, и операторы маневрируют этими автомобилями с помощью джойстиков в режиме реального времени. Единственный способ связи с Aquanaut без проводов - акустический модем. Эта хорошо зарекомендовавшая себя технология имеет диапазон в несколько десятков километров под водой, по цене высокой латентности и очень низкой пропускной способности, в районе нескольких килобайт в секунду, в лучшем случае. HMI планирует использовать небольшие беспилотные надводные аппараты в качестве ретрансляторов между роботом и спутниками связи, и оттуда Aquanaut может управляться из любой точки мира. Тем не менее, эти ограничения делают прямой человеческий контроль непрактичным, поэтому Акванавт должен будет сделать все, что в его силах самостоятельно.
"Здесь много автономии, которая должна быть встроена"
- объясняет Яяти.
"Ты доверяешь роботу многое сделать."
HMI планирует поддерживать высокий уровень диспетчерского контроля над Aquanaut, делегируя большинство низкоуровневых решений мощным бортовым компьютерам робота, на которых установлена операционная система Robot Operating System, или ROS, популярная программная платформа для исследовательских и коммерческих роботов. Используя набор датчиков в головке, который включает стереокамеры, структурированный датчик освещенности и гидролокационную систему, робот создает детальный 3D рендеринг окружающей среды. Но вместо того, чтобы пытаться отправить всю 3D карту обратно оператору, передаются только очень маленькие и сильно сжатые подсекции, и оператор может сопоставить их с существующей моделью структуры, на которую смотрит Aquanaut.Затем оператор посылает простые команды, такие как "Поверните клапан на 90 градусов по часовой стрелке". Робот самостоятельно решает, как захватить клапан и с какой силой приложить усилие при вращении, и по завершении выполнения задания отправляет обратно подтверждение. Оператор все еще управляет действиями робота, но не требует ручного управления роботом или интенсивного потока видео в реальном времени с высокой пропускной способностью.Долгосрочный план HMI состоит в том, чтобы продавать аква-вт интервенции как услугу. Используя небольшие парки роботов, распределенные по Северному морю или побережью Калифорнии, нефтегазовым компаниям просто необходимо будет запросить выполнение задания, и HMI назначит ближайшего робота для его выполнения. Рэдфорд говорит, что для управления одним традиционным АДУ требуется около семи человек. "Мы думаем, что сможем это перевернуть", - говорит он. "Мы думаем, что один оператор может управлять семью Акванавтами."При низкой пропускной способности соединения и периодическом нахождении оператора в петле существует повышенный риск возникновения проблем, говорит Мэтью А. Франчек, профессор машиностроения Хьюстонского университета и директор Международного научно-исследовательского института подводного инжиниринга. "Неопределенность есть", - говорит он. "Я беспокоюсь о неисправности во время операции, которая может иметь как финансовые, так и экологические последствия. Несмотря на то, что технология захватывающая, они должны доказать, что она сработает."Фотография акванавта в одном из крупнейших крытых бассейнов в мире в Лаборатории нейтральной плавучести НАСА.
Исчезла плавать: Чтобы протестировать Aquanaut в контролируемых условиях, Houston Mechatronics привез робота в один из крупнейших крытых бассейнов в мире. Лаборатория НАСА по нейтрализации плавучести, в которой астронавты тренируются в условиях невесомости, достаточно велика, чтобы содержать полномасштабные макеты основных модулей Международной космической станции [на заднем плане]. После трех изнурительных дней тестирования Aquanaut в NBL, команда празднует с кипятком рака на парковке за офисом HMI, в сопровождении невероятных банок из Robot Fish IPA, которые прибыли из пивоварни в Бруклине, штат Нью-Йорк. Рассказы о роботах в NASA течет так быстро, как пиво, пока я учился играть в карниз и соки.Ощущение облегчения от того, что испытания прошли успешно, легко переросло в воодушевление от будущего. Рэдфорд объясняет, что нынешняя версия Aquanaut является в первую очередь демонстрационной и испытательной платформой, рассчитанной на относительно мелководье с максимальной рабочей глубиной 300 метров. В то время как эта версия может выполнять коммерческие операции во многих частях мира, HMI уже разрабатывает расширенную версию, которая сможет проехать несколько сотен километров и достичь глубины 3000 метров, необходимой для обслуживания таких районов, как Мексиканский залив.И, конечно, коммерческая деятельность - это не единственное, что HMI исследует для акванавта. Рэдфорд не мог говорить со мной официально о какой-либо потенциальной работе с Министерством обороны США, но в конце 2018 года Агентство по передовым оборонным исследовательским проектам объявило о программе под названием Angler, ищущей предложений по "разработке подводной автономной системы, которая может перемещаться и физически манипулировать объектами на морском дне". На иллюстрации DARPA, сопровождающей объявление, изображена модернизированная подводная лодка-робот с двумя руками, концепция, которая хорошо подходит для одной из компаний Хьюстона.Вечеринка продолжается снаружи, но люди уже начинают просачиваться обратно к своим столам, собираясь подготовить Акванота к следующему тесту NBL. Ее первая демонстрация в открытом море, вероятно, состоится в августе на военно-морских учениях на Род-Айленде. Для робота, который был разбит на куски в марте, это агрессивный график, но Рэдфорд уверен, что его команда справится с этим.
"Забавно приходить работать над чем-то дерзким", - говорит он. "Мы считаем, что есть лучший, более экономичный способ выполнять работы под водой. И мы докажем это."