Учёные из MIT придумали систему симуляции частиц для роботов. Благодаря ей машины смогут хватать предметы из разных материалов так, чтобы они не разваливались на части.
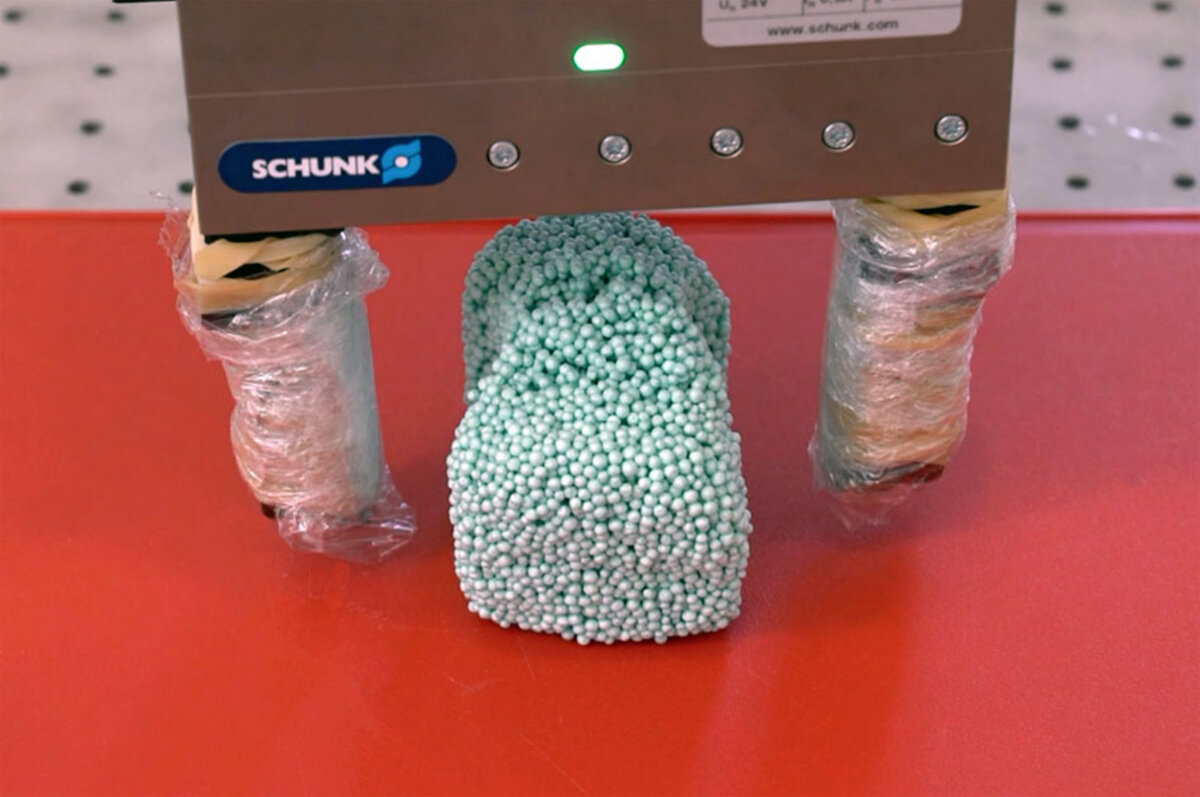
Для демонстрации исследователи взяли деформируемую пену и придали ей форму суши. Двупалый робот RiceGrip обнаружил пену с помощью камеры и системы распознавания объектов. А новая система позволила ему взглянуть на «суши» как на динамический график деформируемых материалов.
Так у робота была возможность подстроиться под ситуацию, если бы что-то пошло не по плану и материал начал разваливаться. Пока система находится в зачаточном состоянии, но когда-нибудь благодаря ей роботы смогут спокойно взаимодействовать с любыми предметами. И тогда суши-повара будут не нужны.
Источник: Engadget
Подписывайтесь на наш канал, чтобы читать интересные новости из мира будущего!



















