
Хватаетесь за голову и не можете понять, КАК вообще тупые железяки могут сами:
- Видеть
- Слышать
- Говорить
- Думать
- И тем более двигаться?
Даже если нет, эта статья будет полезным пособием для возможно предотвращения кибер-апокалипсиса.
Грубо говоря, искусственный интеллект и все его алгоритмы строятся на очень жестокой и страшной форме статистики, аналитики и конечно же математики.
Как это обычно происходит:
Есть процесс, который человек выполняет и хочет автоматизировать. (разговор с клиентом, вынос мусора, поглаживание кота). Сейчас это выливается в голосовые ассистенты (Siri, Google Assistant, Alexa), умные камеры видеонаблюдения, способные определять людей, оптимизацию поисковых движков и так далее.
Целевой процесс для удобства и полного понимания раскладывается на минимальные составляющие - возьмем пример с котом.
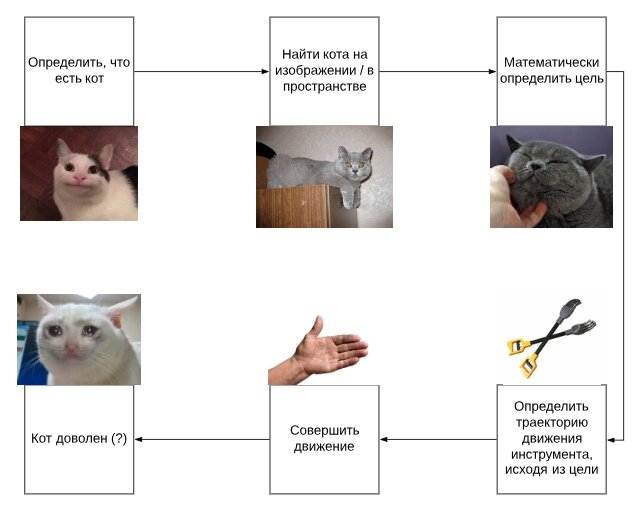
Представим, что у нас есть роботизированная рука с камерой, способная совершать движения в пространстве. Коту уже страшно, но то ли еще будет.
#1. Первый пункт - определение кота на изображении с видеокамеры роботизированной руки для поглаживания кота. Для того, чтобы алгоритму справиться с определением объекта КОТ на изображении нужно показать ей огромное количество изображений этого домашнего животного, в которых заранее человеческими силами выделены границы пушистого. Чем больше возможных вариаций кота и его расположений - тем лучше ваш робот сможет находить его на изображении со своей видеокамеры.
При помощи статистики о расположениях котов алгоритм определяет основные черты цели, повторяющиеся от изображения к изображению и далее применяет эти самые черты для поиска кота на новых изображениях, которые он получает с видеокамеры. Вот она иллюзия осознанности!
#2. Дело за малым - научить роботизированную руку совершать процесс поглаживания.
Виртуальное окружение с законами физики, виртуальный кот и единственная цель существования для робо-руки - погладить виртуального кота.
Роботической руке нужно создать виртуальный движок управления - сказать, что ты можешь двигать себя влево, вправо, вверх, вращаться и т.д. Погладить кота в данном случае можно объяснить как - совершить императивную коллизию объекта робо рука и определенного участка объекта кот, инициированную НЕ котиком.
Обучение в целом, может представлять что-то подобное:
Остались косметические корректировки: отрегулировать силу поглаживания, чтобы коллизия руки с котом не прикончила одного из участников (прости, пушистый), конкретизировать процесс поглаживания, добавить виртуальному коту модель движения, чтобы он мог убегать от робо руки.
Не вижу смысла углубляться далее, думаю, концепция понятна. И эту концепцию можно масштабировать до бесконечного числа применений от роботов-дворецких до ИИ, который помогает принимать решения в вашем тяжелом бизнесе или выборе одежды утром.