Исследовательская группа из Корнелльского университета продемонстрировала группу модульных роботов, которые движутся вместе как единое целое, но распадаются и преобразовываются в другую форму, которая лучше подходит для поставленной задачи или для преодоления препятствий.
Модульный робот. Принцип работы.
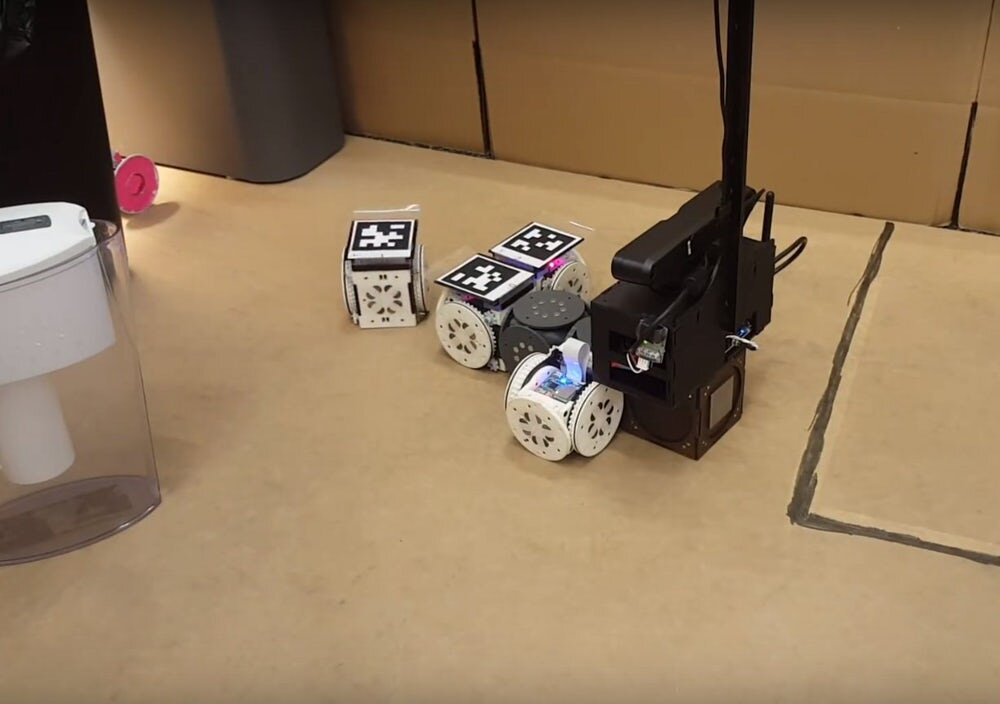
Модульный робот на самом деле состоит из нескольких роботов в форме куба с колесами на четырех сторонах, разработанных Университетом Пенсильвании. Они прикрепляются друг к другу с помощью магнитов, а затем к центральной башне с камерой и компьютером, который нужен для обработки поступающих данных.
Каждый куб-бот связывается с центральной башней через Wi-Fi. Компьютер башни использует программное обеспечение, которое включает в себя алгоритмы восприятия для составления карт и навигации и «планировщик высокого уровня для управления действиями куб-ботов и изменениями формы», которые помогают коллективу модульных роботов автономно ориентироваться в среде и выполнять задачи.
У исследовательской группы уже есть база данных с 57-ю возможными конфигурациями роботов, которую предложили студенты и участники соревнований по робототехнике. Эти конфигурации включают в себя т.н. Хоботок (с удлиненной “рукой” для захвата), Скорпион (где куб-боты расположены в Т-образной форме) и Змею (где куб-боты строятся в одну линию). Библиотека системы также включает в себя 97 типов поведения, в том числе взятие или бросание чего-либо, выстраивание в высоту и движение вперед или назад.
При активации модульный робот выбирает стиль поведения и конфигурацию куб-ботов, чтобы сформировать тактику для выполнения назначенной задачи.
Исследователи говорят, что это первые роботы, которые способны самостоятельно решать задачи и изменять свою форму, делая это путем анализа самой задачи и изучения окружающей среды. Данная роботизированная система была испытана в трех экспериментах.
Эксперименты над модульным роботом.
Во-первых, коллективу модульных роботов было поручено находить, брать и доставлять все розовые и зеленые объекты в область, отмеченную синим квадратом. После исследования пространства в режиме движения и нахождения объекта, куб-боты преобразились в форму Хоботка, схватили объект из узкого пространства, а затем снова изменили форму, чтобы перенести его в назначенную область.
Во втором эксперименте модульный робот должен был положить электронную плату в коробку взобравшись на лестницу, роботу потребовалось 24 попытки для выполнения этого задания, причем подъем по лестнице оказался особенно проблематичным. Наконец было поставлено задание прикрепить почтовую марку на ту же коробку.
Комментарий руководителя
«Модульные роботы в целом являются просто потрясающими системами, потому что они не ограничены одной формой, поэтому они очень гибкие», - сказал руководитель проекта Хадас Кресс-Газит. «Аппаратное обеспечение все еще находится в стадии тестирования, но если бы у нас были полностью функционирующие модульные роботы, они были бы очень полезны и многозадачны».
Проект подробно описан в документе, доступном в цифровом репозитории Cornell. Вы можете увидеть модульный робота в действии на видео ниже.
Источник: Корнельский университет